视频赏析
内容摘要
水下球形机器人是海洋探测的得力助手,运动控制算法在其中具有至关重要的作用。传统的运动控制算法不能消除各个运动方向之间的耦合关系,导致各个方向的运动控制相互干扰,严重影响控制效果。本文提出了一种新的基于机器人姿态计算的解耦运动控制算法,采用4个模糊控制器独立控制机器人的全方位运动,适用于为近海、浅水和狭窄地形设计的水下球形机器人。实验表明,本文提出的运动控制算法可以显著提高水下球形机器人运动的灵活性和精度。
图文导读
(一) 本文搭建了水下球形机器人平台,其结构如图2所示。机器人本体分为两个半球形外壳,每个外壳直径30cm,总重6.6kg。上壳体包含一个密封舱和一个进水舱,用于平衡重力和浮力。密封舱内配有机器人主板、电源控制模块、无刷电机驱动器和机器人的主处理器 NVIDIA Jetson TK1;密封舱表面均匀分布着12个高精度压力传感器,通过每个传感器测得的压力数据的平均值和差值可得到机器人在水中的深度和相对水流速度。进水舱内的水箱中安装了配重块和浮力块,以精确平衡机器人在水中的重力和浮力;此外,进水舱内还安装了一个小型水声通信装置,用于传输控制信号和机器人状态数据。下壳体配备一个可拆卸的电池盒和四个具有水陆两栖运动能力的复合驱动腿。
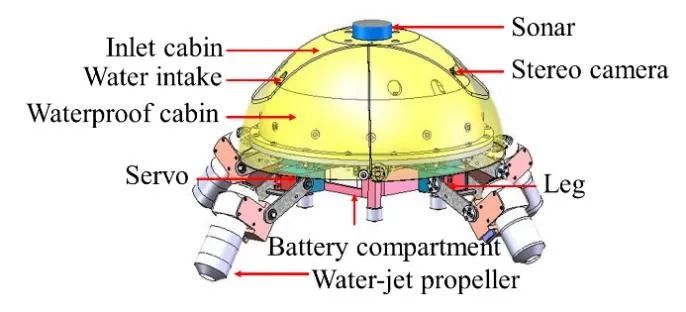
图2 水下球形机器人平台结构图
(二) 本文描述了球形水下机器人的实时姿态解耦控制算法,该算法使用4个模糊 PID 控制器独立控制机器人X轴、Y轴和Z轴以及航向角运动。由于 XOY 平面上的任何任务轨迹都可以分为直线、转向和曲线运动,且Z轴的控制与喷水电机的喷水角度密切相关,因此三维空间的运动控制量K可以表示为k=[f1 f2 f3 f4 θ α1 α2 α3 α4]T。图6为 XOY 平面运动模型,图7为Z轴运动模型。
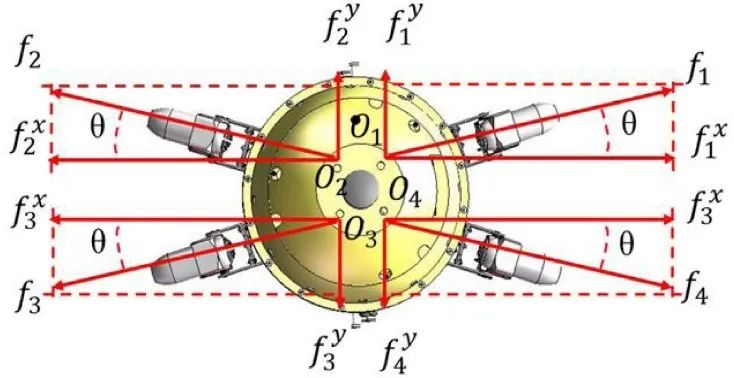
图6 XOY 平面运动模型
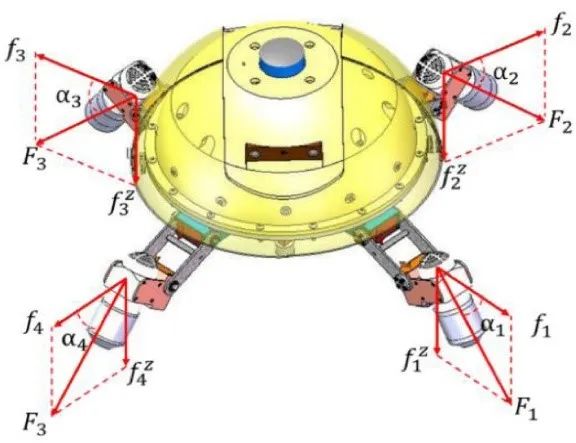
图7 Z轴运动模型
(三) 本文在 ASR-IV 水下球形机器人平台上进行了水下运动控制实验。为对比本文提出的三维解耦运动控制算法与多运动模式控制算法的性能,本文设计了偏航角控制实验、线性运动控制实验、矩形运动控制实验和圆形轨迹运动控制实验。实验于3m×2m×1.3m的水池中进行,全局相机放置于水面正上方2m处记录实验过程。
图10为偏航角控制实验结果。由图可见,两种方法均没有稳定误差,"H"模式控制算法的上升时间和峰值时间分别为1.12s和1.68s,而解耦控制算法的上升时间和峰值时间分别为1.10s和1.69s。实验结果表明,"H"模式的航向控制算法与解耦单独控制算法的结果是一致的。
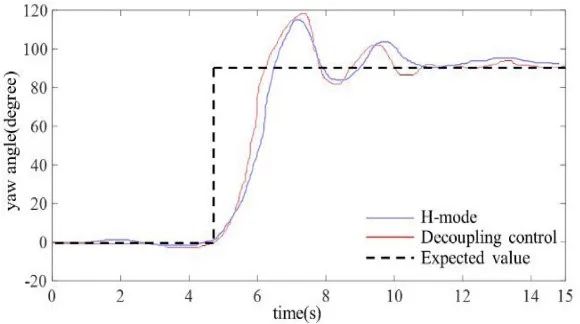
图10 偏航角控制实验结果
图11为线性控制实验结果。由图可见,使用多运动模式控制算法时,机器人在AB段使用"H"运动模式,在BC段使用"X"运动模式,运动轨迹的最大误差为0.19m,而使用解耦控制算法的运动轨迹最大误差为0.1m,后者算法能够显著提高控制精度。
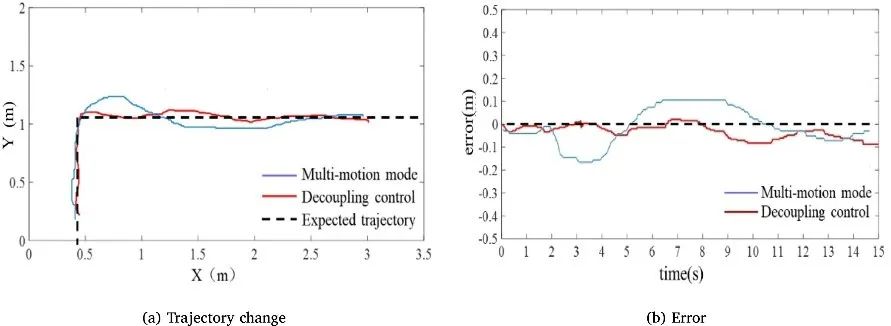
图11 线性控制实验结果
图12为矩形控制实验结果。由图可见,使用多运动模式控制算法的最大轨迹误差为0.23m,出现最大误差的位置与线性运动实验一致,该方法可以在线性运动期间达到稳态。但水下机器人旋转90°后,控制量并未在7.5s内达到预期值。解耦运动控制算法的最大误差为0.14m,航向角波动最小。与多运动模式控制算法相比,采用解耦运动控制算法的系统稳态时间更短,对突变变量的稳定能力更强,超调量更小,上升时间更短。
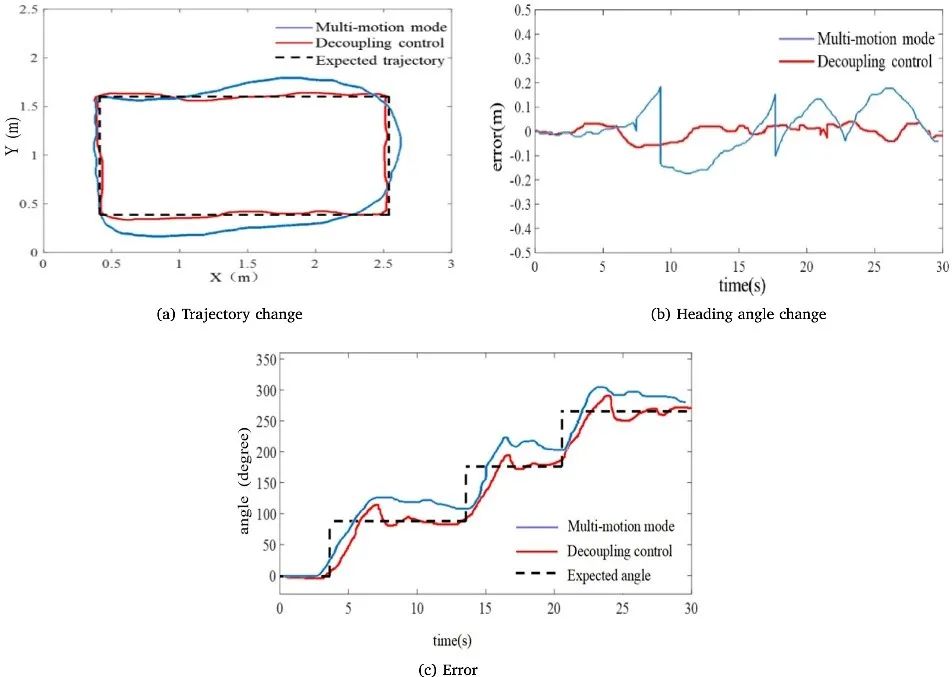
图12 矩形控制实验结果
图13为圆周运动控制实验结果。由图可见,最大控制误差为0.07m,机器人保持匀速运动,航向角保持匀速变化且始终指向圆心。
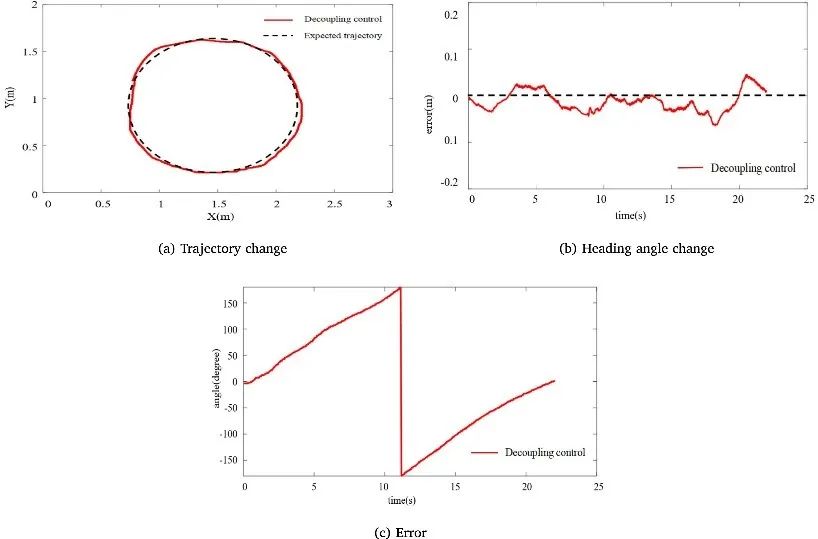
图13 圆周运动实验结果
实验结果表明,与多运动模式控制算法相比:本文提出的算法执行线性运动控制的最大误差为0.1m,控制精度提高了47.4%;执行矩形运动控制的最大误差为0.14m,控制精度提高了39.1%。此外,本文算法可控制目标做圆周运动,最大控制误差为0.07m,而多运动模式控制算法无法实现圆周运动。综上,本文算法具有较高的精度和灵活性。
【作者信息】
Pengxiao Bao1,Yao Hu1,Liwei Shi1,*,Shuxiang Guo1,2,Zhengyu Li1
1 Key Laboratory of Convergence Medical Engineering System and Healthcare Technology, Ministry of Industry and Information Technology, School of Life Science, Beijing Institute of Technology, Beijing 100081, China
2 Faculty of Engineering, Kagawa University, Hayashi-cho, Takamatsu 2217-20, Japan
* Author to whom correspondence should be addressed: shiliwei@bit.edu.cn
【DOI】
https://doi.org/10.1016/j.birob.2022.100067
【全文链接】

期刊信息
Biomimetic Intelligence and Robotics (BIROB, ISSN 2667-3797, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx

