视频赏析
内容摘要
为解决“黑飞”无人机的问题,本文设计了一种基于捕捉技术的装置。该装置具有一个可弹出的保护罩和一个大功率的驱动器,保护罩用以防止捕捉网在发射前散落,驱动器可同时驱动电机运动,以保证周围6个发射机的同步性。文章主要介绍了此捕捉装置的机械结构、控制方案、运动仿真和实验验证效果。通过捕捉实验验证了本装置的可行性,并通过拉脱力实验测试了捕捉网的稳定程度。与现有的捕捉方法相比,该装置具有环保、可调整、反应迅速并且能够无损捕捉目标的特点。
图文导读
(一) 现有的非破坏性反无人机技术包括诱骗控制、拦截、射频干扰和捕捉。本文经过调查发现,现有的捕捉技术都存在一定的局限性,在对这些局限性进行全面分析后,提出了一种基于捕捉技术的反无人机装置,图1为捕捉装置整体结构。该装置包括底座、中心发射机、网罩、捕捉网、保护罩和6个发射机。去掉保护罩后的装置如图1(a)所示,图1(b)为装置整体侧视图。在装置启动前,捕捉网折叠放置在保护罩内。保护罩连接到中心发射机的质量块,用于防止捕捉网在发射前散落。中心发射机安装在底座的中心,用于弹出保护罩。6个发射机等距地安装在底座的外圈,用于发射捕捉网。每个发射装置都由一颗调节螺钉连接至底座,且装置的倾斜度可调整。

图1 捕捉装置: (a)去掉保护罩的装置示意图;(b)装置侧视图;(c)展开后的捕捉网;(d)启动后的捕捉装置;(e)发射装置的结构
(二) 图5为捕捉装置的动作过程仿真。动作过程包括保护罩弹出、质量块弹出、捕获网打开和捕获网包裹目标共4个阶段(图5a)。在捕捉网展开和包裹目标的仿真过程中,由于惯性作用,捕获网包裹住目标后会反弹发生形变,但没有张开,仍然包裹着目标,证明该装置具有良好的捕捉效果(图5b)。回弹过程的动作仿真如图5c所示。
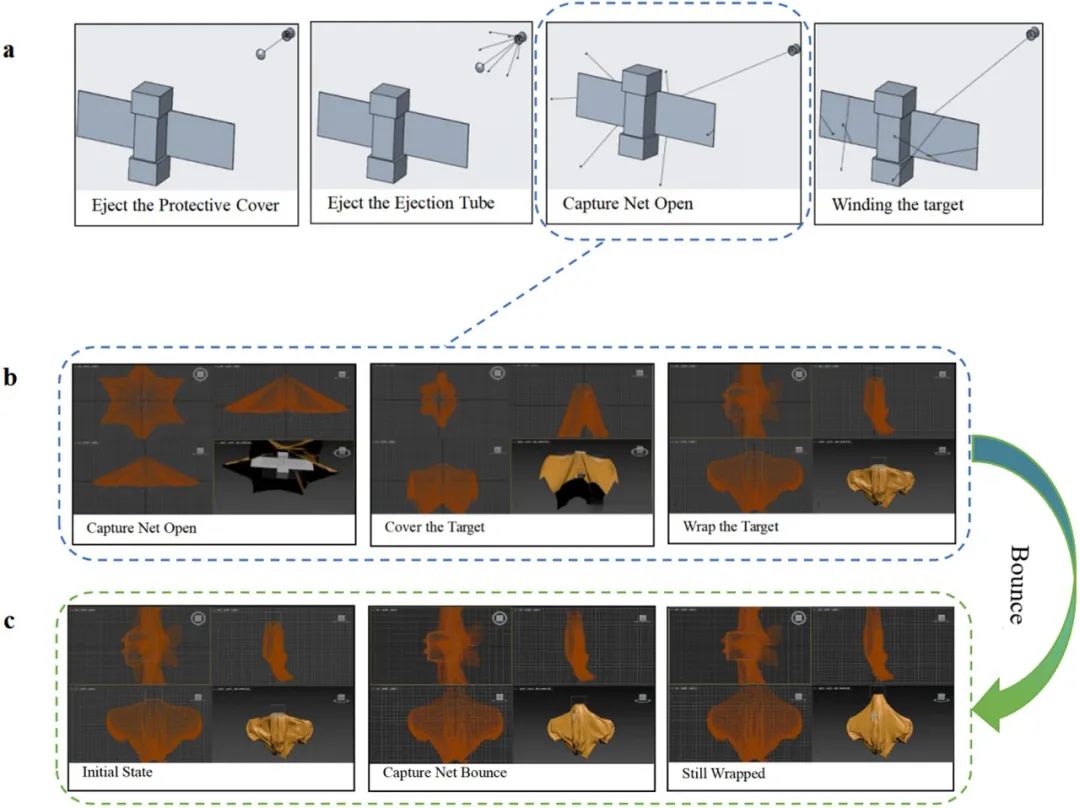
图5 捕捉装置动作过程仿真
(三) 图7为捕捉装置的动作过程实验验证。从释放质量块到捕捉网与目标碰撞大约需要0.175s。在随后的摇晃试验中,捕捉网没有散开,证明捕捉装置的拉力不低于0.5N。只要目标进入捕获装置下方3m,并且在以装置为中心半径2.2m的范围内,就可以实现捕获。
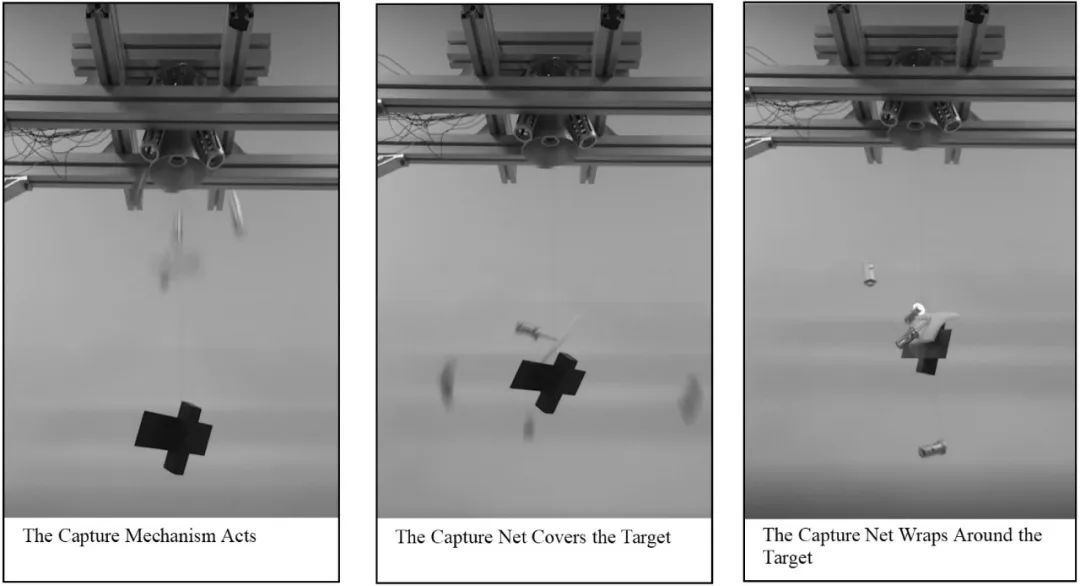
图7 捕捉装置动作实验验证
【作者信息】
Yingzi Chen1,Zhiqing Li1,*,Longchuan Li1,Shugen Ma2,Fuchun Zhang1,Chao Fan1
1 College of Information Science and Technology, Beijing University of Chemical Technology, Beijing 100089, China
2 Department of Robotics, Ritsumeikan University, Shiga 525-8577, Japan
* Author to whom correspondence should be addressed: lizhiqing@mail.buct.edu.cn
作者单位简介:
机器人与智能装备研究中心依托于北京化工大学高精尖中心和信息科学与技术学院,发挥多学科交叉与协同创新优势,以面向海洋、航空航天、空间、民用机器人技术为研究领域,以开拓海洋、航空航天智能化装备、民用等领域机器人创新应用为目标,重点突破航空航天机器人、地面及水下机器人、智能制造等重点领域的关键技术,开展相关理论技术研究及装备研制。
【DOI】
https://doi.org/10.1016/j.birob.2022.100060
【全文链接】
期刊信息
Biomimetic Intelligence and Robotics (BIROB, ISSN 2667-3797, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx

