视频赏析
内容摘要
基于表面肌电信号(sEMG)的人机交互是协作穿戴式机器人的常用控制方式,目前的研究一般通过增加高性能采集设备或采集通道数来提高sEMG的辨识精度,增加了系统的复杂度和开发成本。本文研制了一种包络sEMG采集设备,提出了基于包络sEMG时域特征的高精度辨识算法,并用于协作穿戴式机器人的交互控制。从前臂肌电信号中提取11类时域特征,基于相关性分析对时域特征进行降维处理,构建了包含5类特征的包络特征集;采用基于神经网络的辨识算法,比较算法在本文构建的特征集、主成分分析(PCA)特征集和Hudgins TD特征集上的辨识精度。实验结果表明,基于上述3类特征集的识别精度分别为84.39%、72.44%和70.89%,本文构建的包络特征集在单通道的sEMG手势识别中具有较好的性能。
图文导读
(一)sEMG采集设备采用差分输入(包括2个检测电极和1个参考电极)采集信号,设计的预处理功能包括预放大、全波整流、平滑处理等,如图1所示。与原始肌电信号相比,该设备采集到的包络肌电信号信噪比低,抗干扰能力强(图2),但存在频域信息丢失的问题,因此本研究更多地关注包络肌电信号的时域特征。
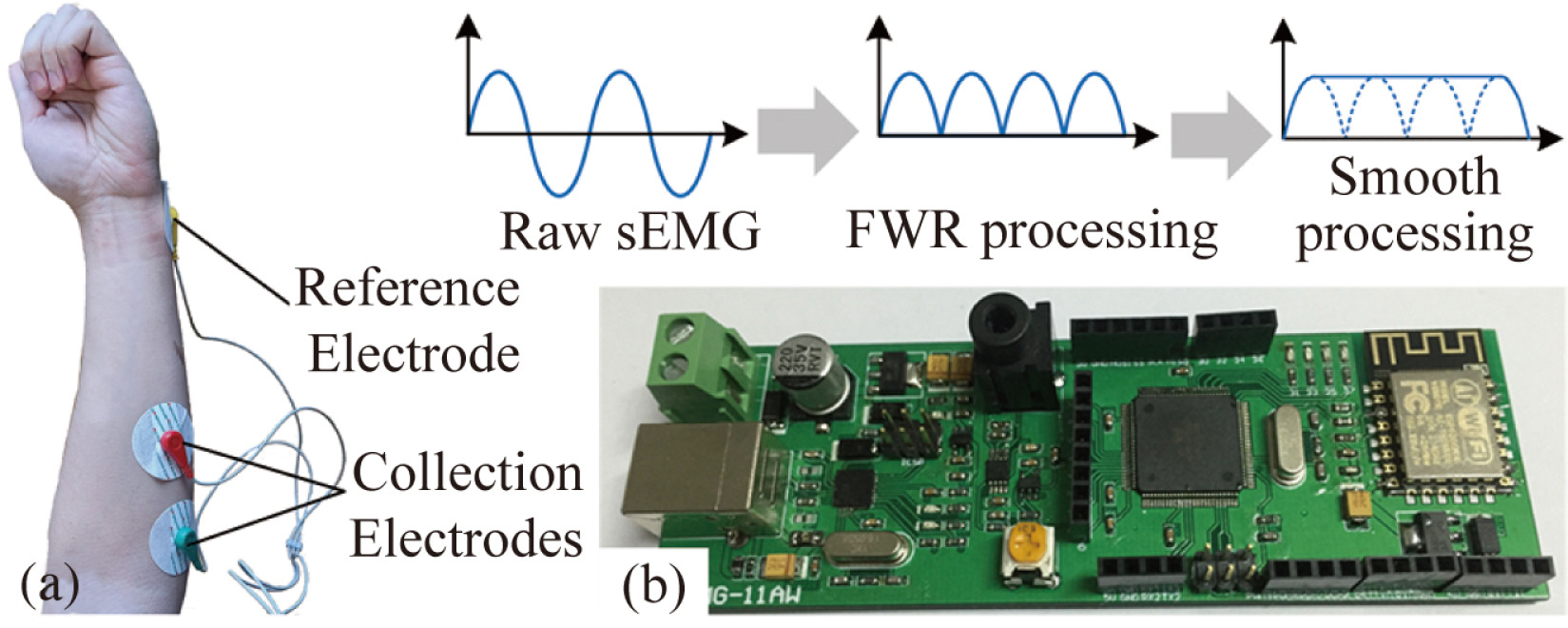
图1 (a) 电极贴放位置;(b) 包络sEMG信号采集设备
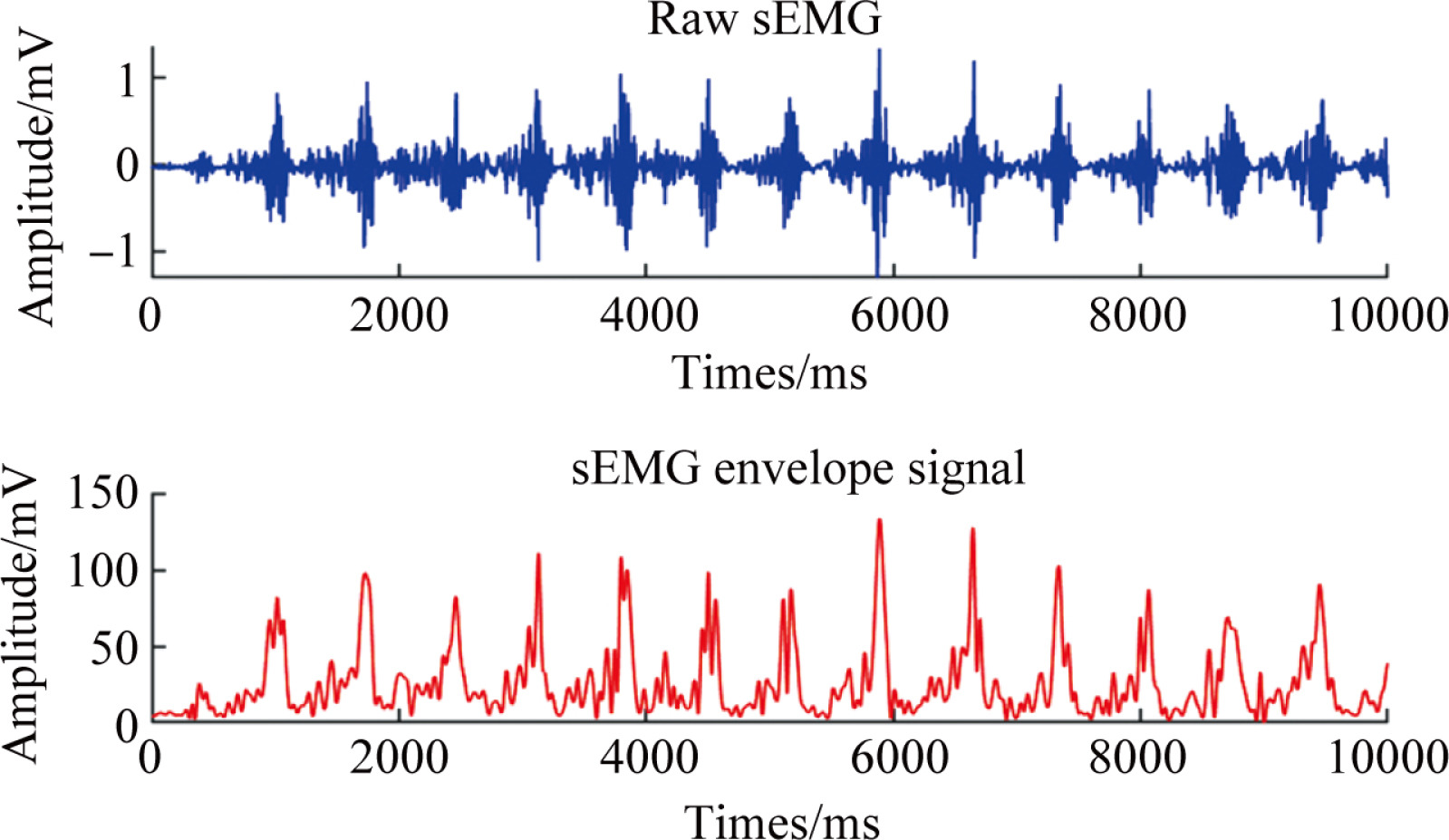
图2 原始肌电信号和包络肌电信号
(二)本文提取的包络肌电信号11类时域特征包括IAV、MAV、MAVS、WL、PV、MV、VAR、STD、RMS、MS和WAMP,基于相关性分析、香农熵、偏度和峰度设计特征对算法进行优化。构建的包络特征集包括MAVS、VAR、STD、MS和WL,同时构建PCA特征集和Hudgins特征集与本文构建的包络特征集进行比较,特征集构建框架如图4所示。
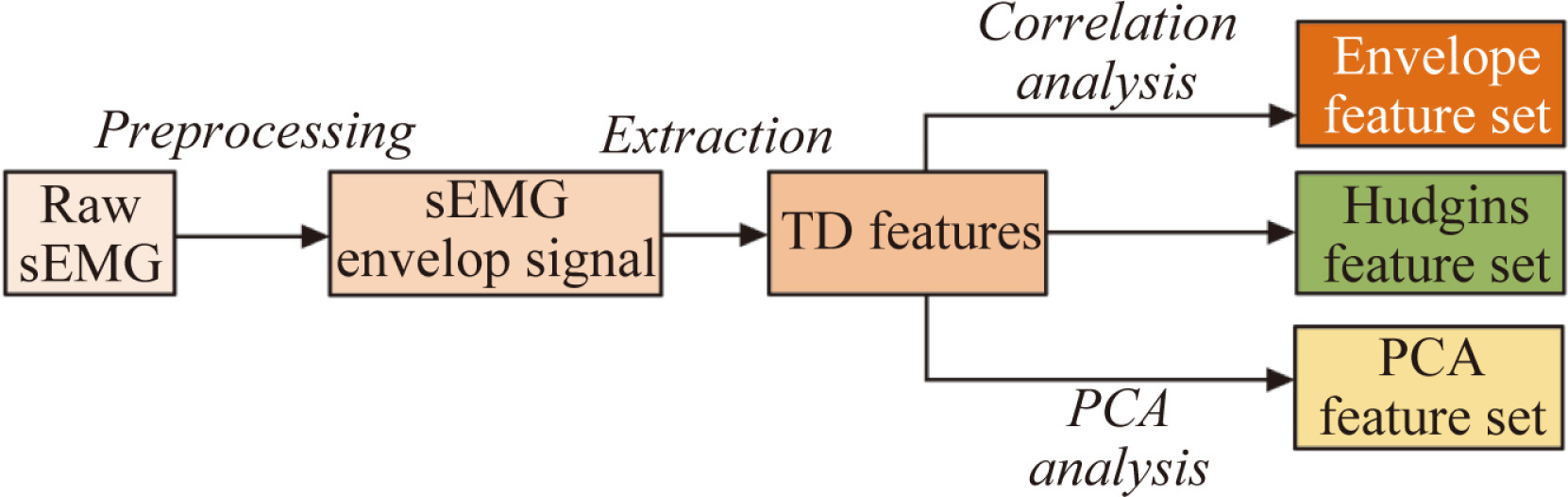
图4 特征集构建框架
(三)本文通过协作穿戴式外肢体机器人进行交互控制实验(图7)。实验设置的5种手势包括运动态FC、PS、 WE、WF和休息态RT,其中前4个运动态手势分别对应穿戴式机器人的4个关节。
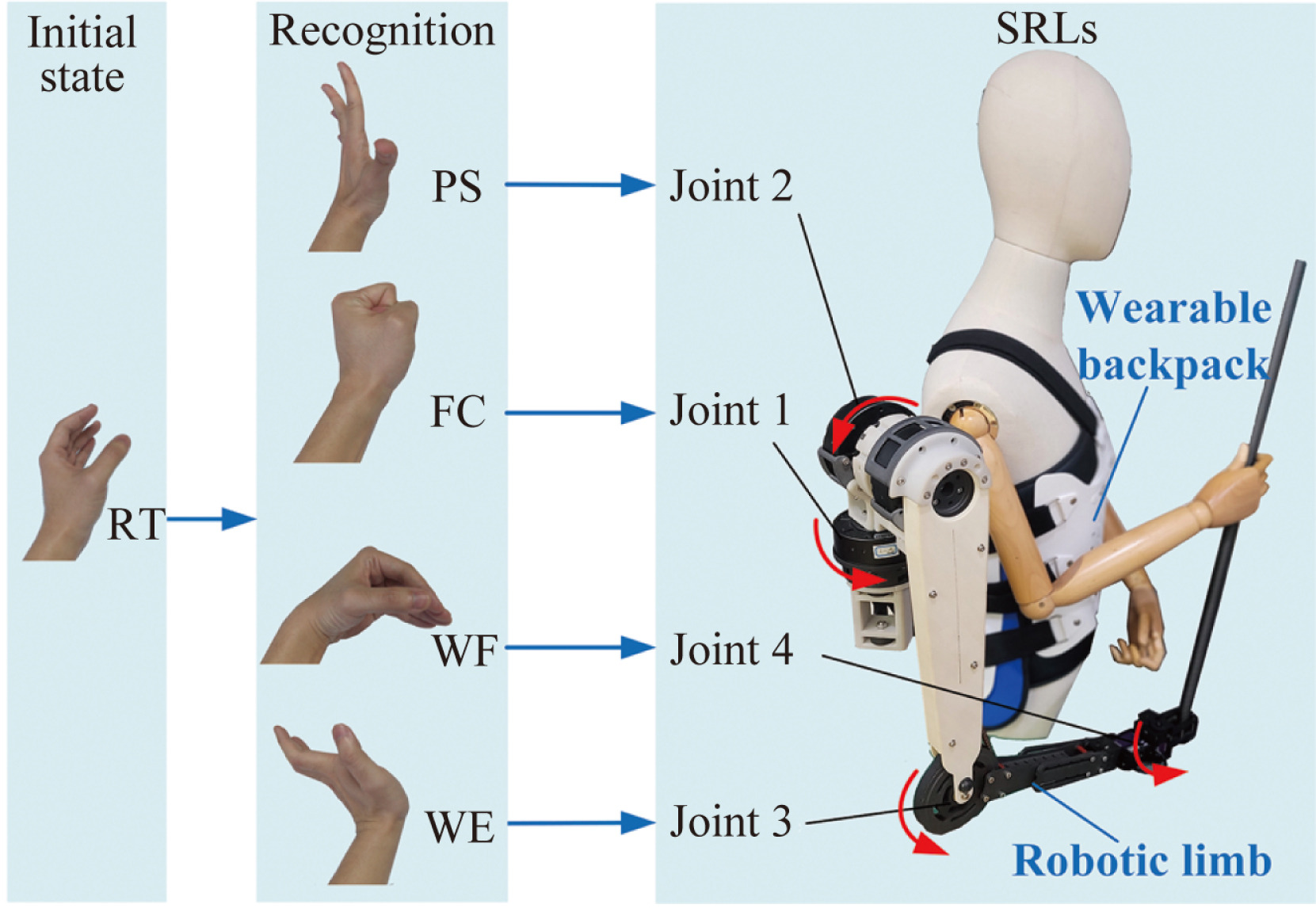
图7 基于肌电信号的穿戴机器人交互控制
文章基于弹性梯度构建了一种改进的BP神经网络用于辨识目标手势。使用F-measure评价所提算法的识别性能,统计每个手势下受试者的F-measure平均值,如图9所示。实验表明,所提辨识方法可以减少个体差异对手势识别性能的影响,在该可穿戴式机器人的交互控制中具有更好的辨识精度和鲁棒性。
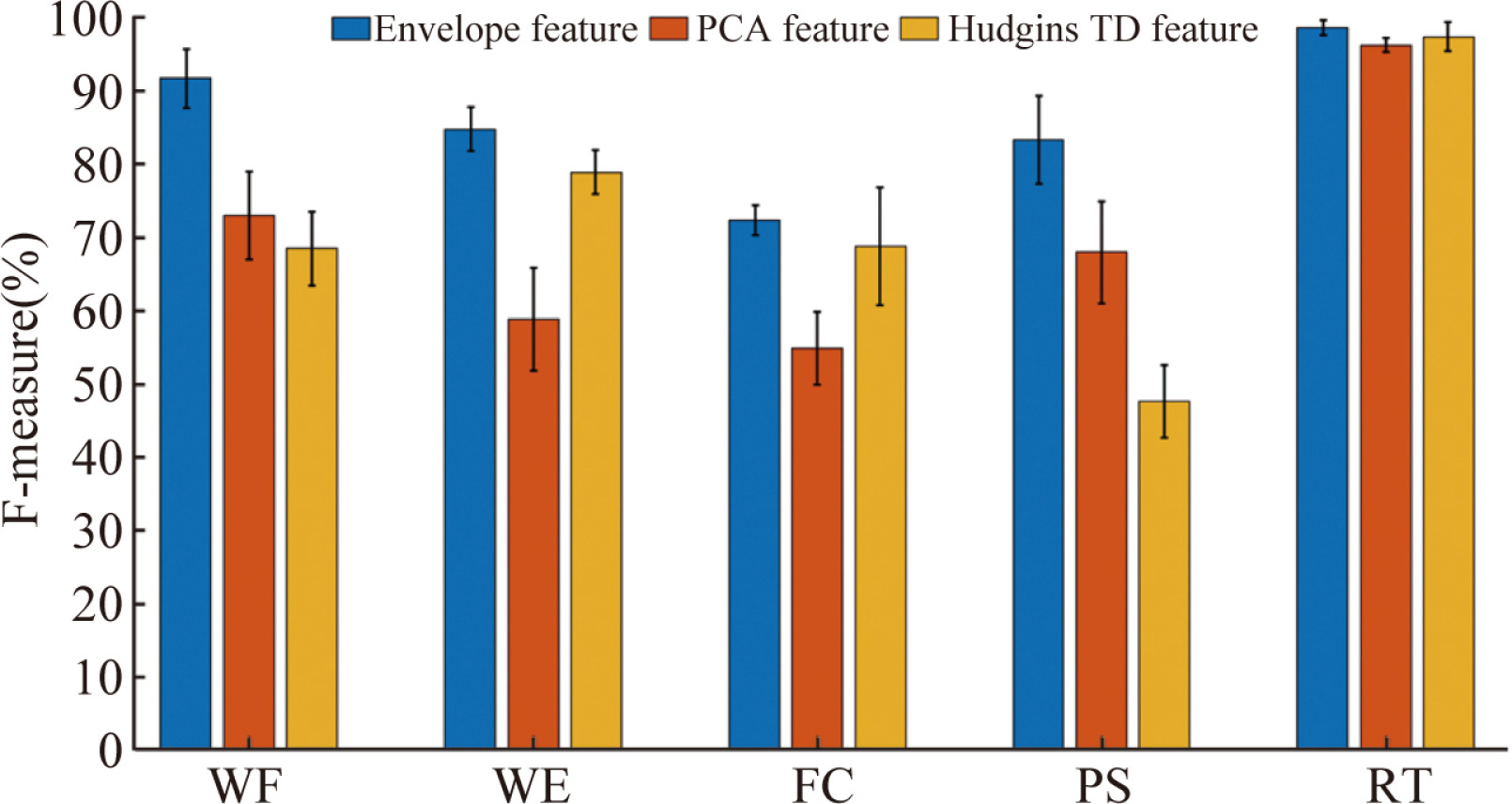
图9 各类手势下3种特征集的平均F-measure
本文提出了基于BP神经网络的辨识算法,并比较了采用包络特征集合和传统特征集(PCA和Hudgins TD)识别5种手势的准确度,实验结果表明,包络特征集的性能优于普通特征集。同时,也可以观察到包络特征集存在与其他特征集相同的问题:与手势WF、PS和RT相比,针对手势WE和FC的识别率偏低。这可能是单通道或时域特征的限制,后续将就通道数量对包络特征集识别率的影响开展相关研究。
【作者信息】
Ziyu Liao1, Bai Chen1,*,Dongming Bai2,3,JiaJun Xu1,Qian Zheng1,Keming Liu1,Hongtao Wu1
1 College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China2 Mechanical & electrical engineering college of Jinhua Polytechnic, Jinhua 321016, China3 Key Laboratory of Crop Harvesting Equipment Technology of Zhejiang Province, Jinhua 311258, China
* Author to whom correspondence should be addressed: chenbye@nuaa.edu.cn
作者单位介绍:
智能机器人及多体系统实验室依托于南京航空航天大学机电学院,实验室响应国家《“十四五”智能制造发展规划》,致力于智能机器人及高端智能装备的研究,以医疗康复、穿戴辅助、医学检测等领域装备创新为目标,发挥多学科交叉与协同创新优势,研制了一系列的微创手术连续体机器人系统和智能辅助穿戴机器人系统,研究方向主要包括连续体手术机器人的设计及实时形状感知与检测技术,穿戴机器人的设计与智能交互,手术导航定位以及主从驱动技术等。
【DOI】
https://doi.org/10.1016/j.birob.2022.100079
【全文链接】
期刊信息
Biomimetic Intelligence and Robotics (BIRob, e-ISSN 2667-3797, p-ISSN 2097-0242, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,入选2019年“中国科技期刊卓越行动计划”高起点新刊类项目(第一批),期刊已被DOAJ和Scopus数据库收录。
涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx

