视频赏析
内容摘要
仿生无人机等非传统无人机因其点可达性精确、机动性强、着陆无地形限制等优点备受关注。扑翼机器人是一种具有新型结构、扑动方式和控制技术的仿生无人机。文章分析了扑翼机器人的扑动模式,并通过风产生的升力和阻力量化风的影响,建立空气动力学模型,解决扑翼机器人的不稳定流动问题。对该无人机进行了运动仿真,并设计了三维工程样机开展飞行试验,验证本文所提模型的精度。
图文导读
(一)本文设计的扑翼机器人(鹰)模仿大型鸟类滑翔、偏航等动作,相比单段扑翼机器人具有承载能力大、能量消耗小和飞行距离长等特点,在空中飞行像大型鸟类因而还具有隐蔽性(图10)。
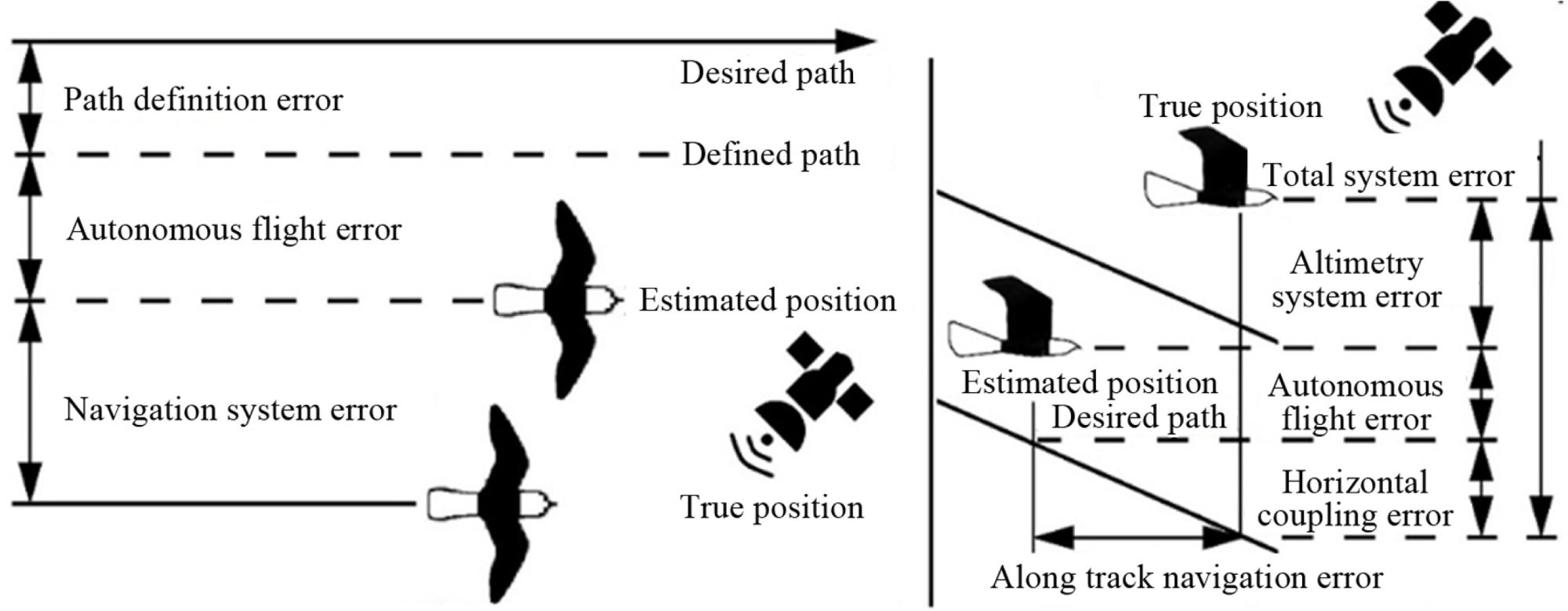
图10 扑翼机器人
(二)扑翼机器人仿鹰的多体骨骼运动和柔性翅膀变形特点,采用整体扑动、展向折弯、弦向扭转和结构柔性变形协调工作的扑翼运动方式,具有慢频扑动、可变滑翔和节省能耗等高度仿生特点。
本文采用无舵面的V型全动尾翼,通过两个舵机控制,能实现俯仰、偏航等多种飞行状态。外段翼用舵机差动扭转控制,提供滚转力矩,在定直飞行时可同时扭转,提高推力(图8)。
图8 外段翼扭转
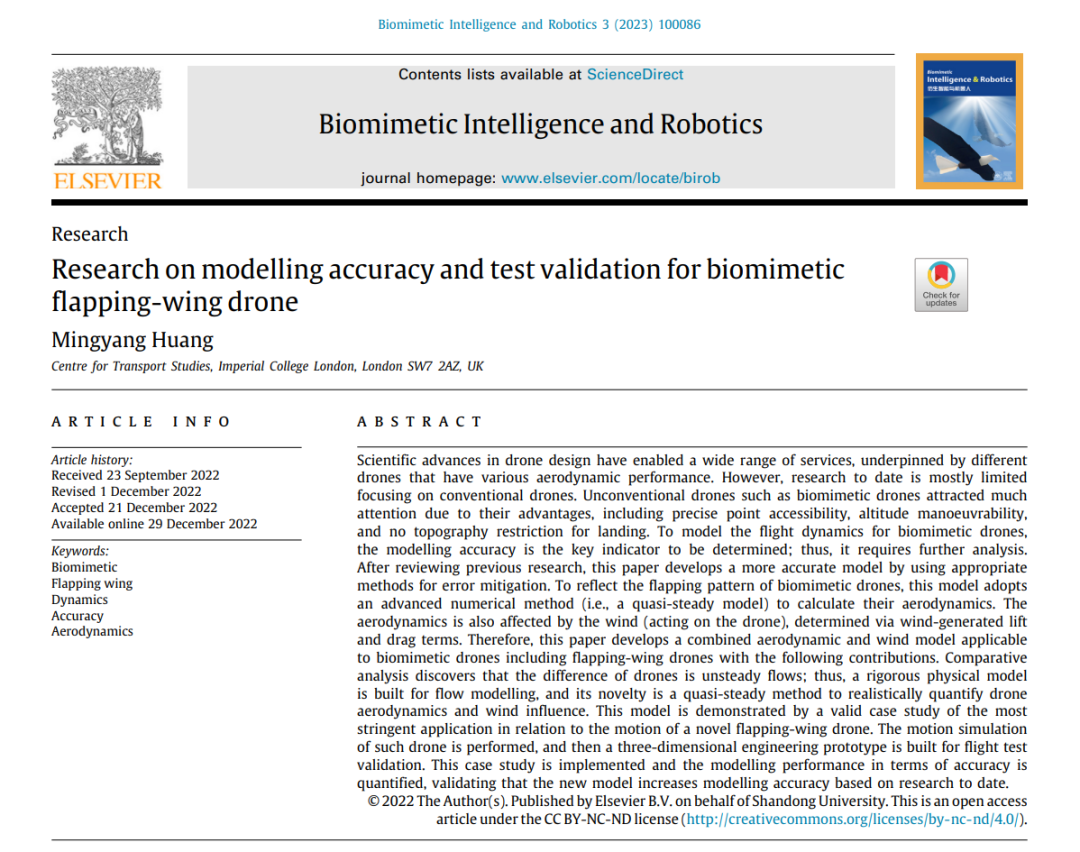
(三)文章创新性地提出了包含慢频率扑动、展向折弯、弦向扭转和结构柔性变形的扑翼模型,并应用准定常方法计算空气动力,结合三维模型和运动仿真分析了扑翼机器人的定位误差和建模误差,如图11、12所示。
图11 扑翼机器人的定位误差
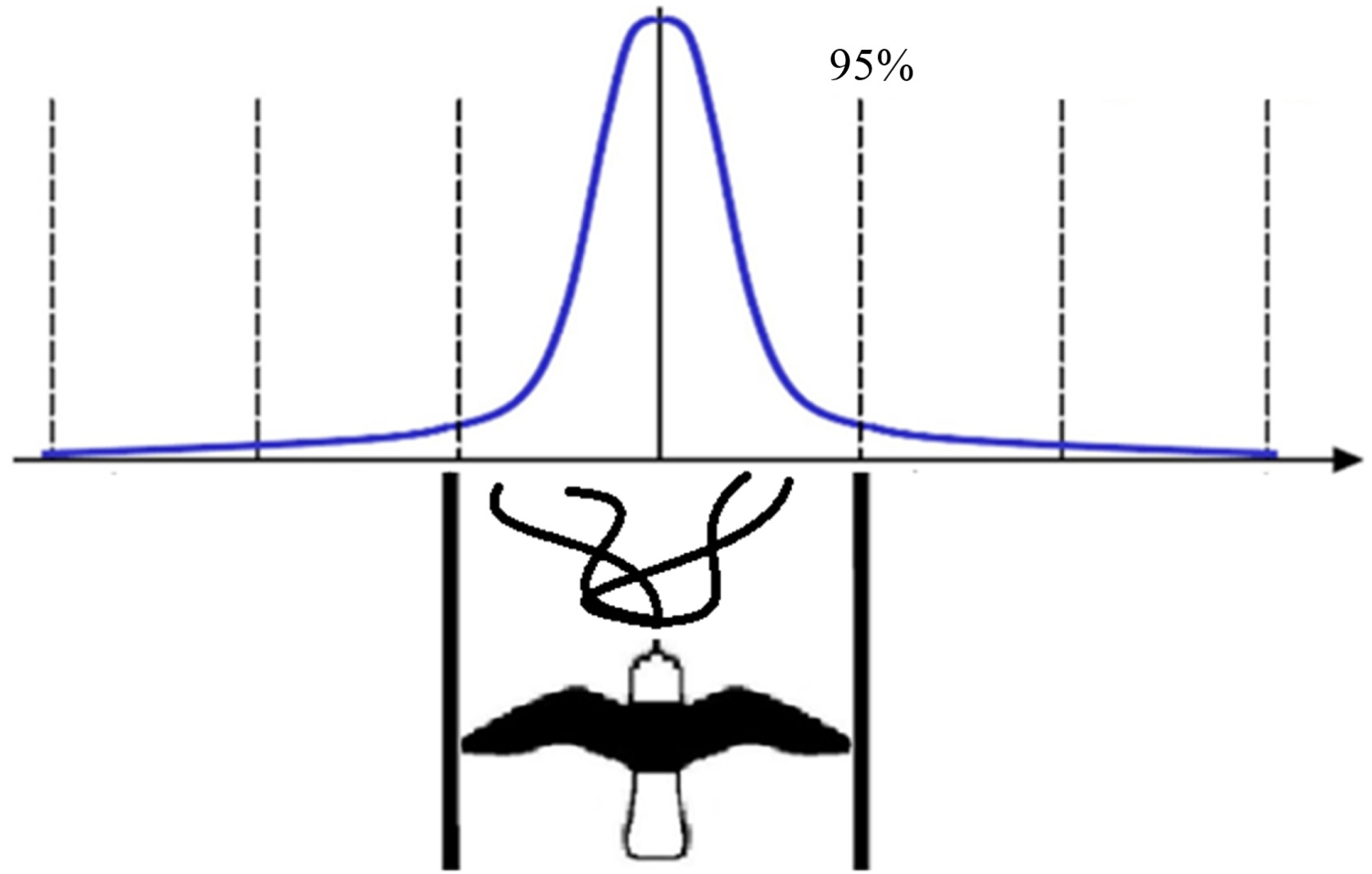
图12 扑翼机器人的建模误差
(四)扑翼机器人的骨架由碳纤维材料和POM塑料加工而成,调整碳纤维骨架的结构即可改变扑翼的柔性,扑翼骨架上安装有一层EPP和风筝无纺布。动力装置采用外转子无刷直流电动机,电动机经过齿轮组减速,由曲柄摇杆机构分别带动两侧扑翼运动和弯折变体。扑翼机器人由手抛掷出完成起飞,在柔性扑翼上下扑动的过程中,依靠惯性力扭转特定的角度,其扑动频率由电动机调速器控制,变化范围是0~3 Hz。扑翼机器人尾翼采用型尾翼构型,呈上反角。
扑翼机器人在城市空间飞行时,会收集飞行环境信息,尤其是建筑物相关信息。文章根据飞行试验中的真实城市空间,在仿真中设置相应的环境。为减少计算时间,采用一系列长方体来覆盖这些建筑物的边界,如图19所示。
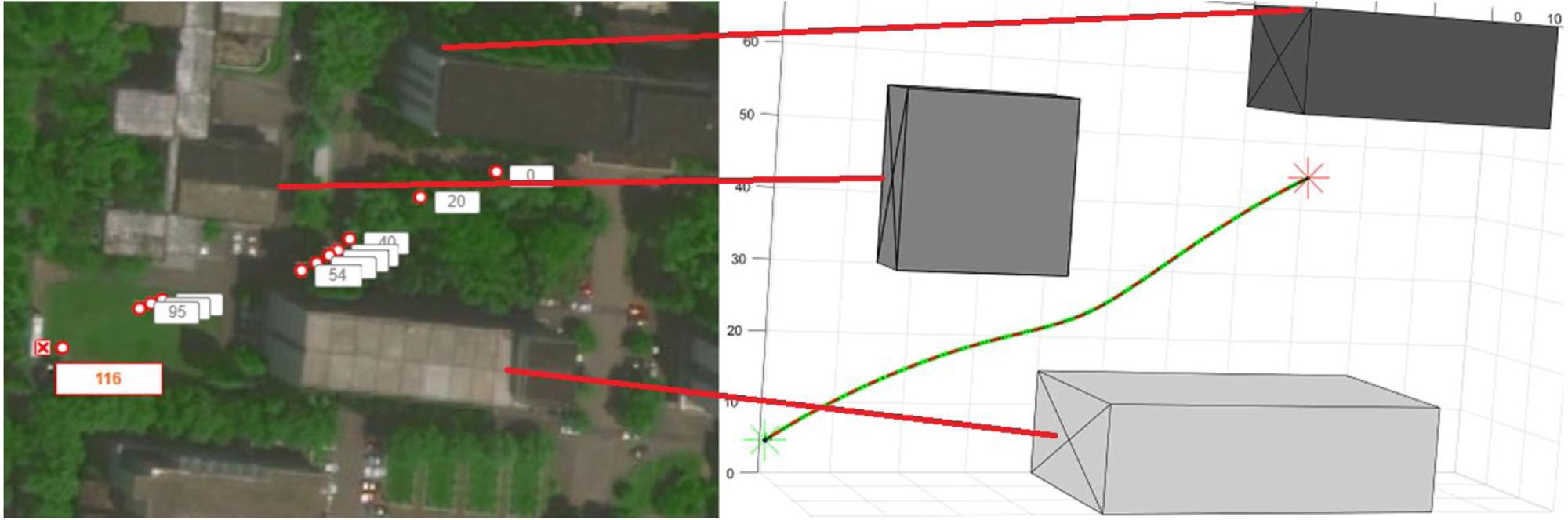
图19 样机测试环境和方法
(五)在实际飞行测试中,扑翼机器人沿着如图19所示的预定义轨迹飞行,并使用机载系统输出测量轨迹。从图21可以看出,模拟的飞行轨迹与实际试验得到的轨迹数据一致。通过比较预测轨迹与飞行试验结果,量化文章所提模型的精度。本文设计的扑翼机器人在实际飞行试验中的定位误差为1.53 m,满足城市服务规定的小于5 m的精度要求。在95%的总飞行时间内,扑翼机器人沿三个正交方向的误差都在1.5 m以内,有效验证了本文所提建模方法的精确性。
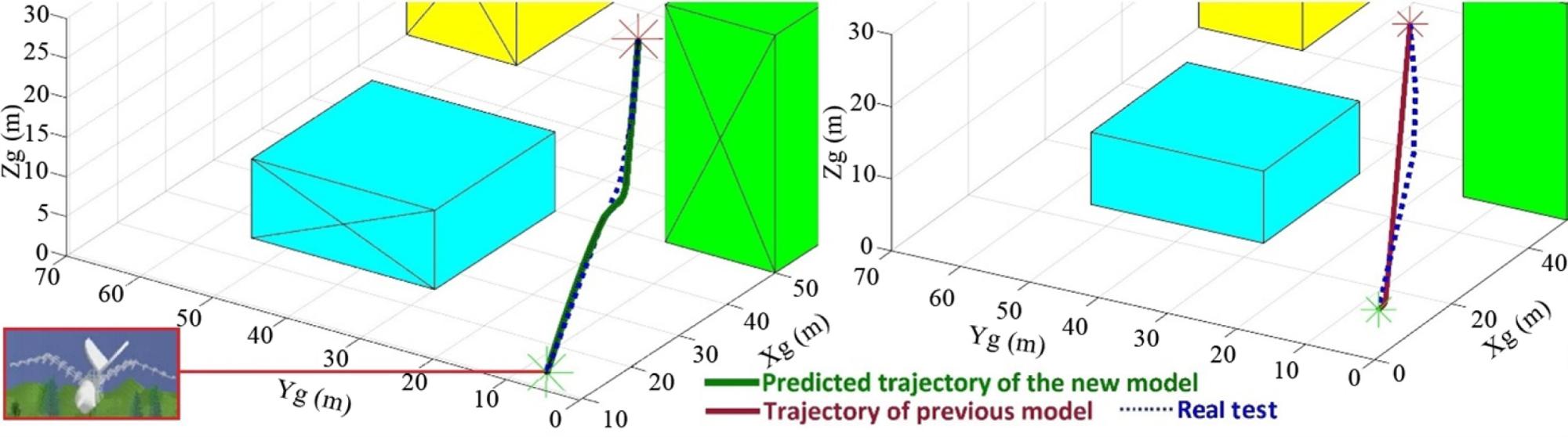
图21 测试结果
针对目前没有既定的规范能够保证扑翼机器人安全高效运行的问题,文章提出了基于RNP概念的无人机性能规范。将误检率、系统故障率和完整性风险分别设为1.0×10-2、1.0×10-3 /h、1.0×10-5 /h,定位误差预警限设为3 m,本研究设计的扑翼机器人满足文中规定的高级别完整性要求。
【作者信息】
Mingyang Huang
Centre for Transport Studies, Imperial College London, London SW7 2AZ, UK
(m.huang18@imperial.ac.uk)
【DOI】
https://doi.org/10.1016/j.birob.2022.100086
【全文链接】

期刊信息
Biomimetic Intelligence and Robotics (BIRob, e-ISSN 2667-3797, p-ISSN 2097-0242, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,入选2019年“中国科技期刊卓越行动计划”高起点新刊类项目(第一批),期刊已被DOAJ和Scopus数据库收录。
涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.sciencedirect.com/journal/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx

