
视频赏析
内容摘要
微型弹跳机器人(MJR)的感知和计算资源有限,因而在有障碍物的非结构环境中完成自主运动对其极具挑战。本文结合姿态角、激光测距和机器人运动分别提出了障碍物检测方法和自主爬楼梯算法。通过微机电系统(MEMS)惯性传感器检测机器人的偏航角,并利用激光测距传感器检测机器人与障碍物的距离,得到障碍物的尺寸信息;在爬楼梯过程中检测楼梯的高度、宽度和机器人相对于楼梯的位置,将这些数据通过无线传感器网络发送到控制终端,更新控制界面中 MJR 和障碍物的相关信息,实现 MJR 爬楼梯过程的实时监测。在楼梯检测、建模和爬楼梯实际实验中,MJR的检测和控制精度满足任务要求,机器人可以自主稳定地完成爬楼梯运动。本文提出的障碍物检测方法和自主爬楼梯算法可以增强 MJR 在环境检测、搜救等任务中的运动能力。
图文导读
(一)本文设计的 MJR 样机如图2所示。
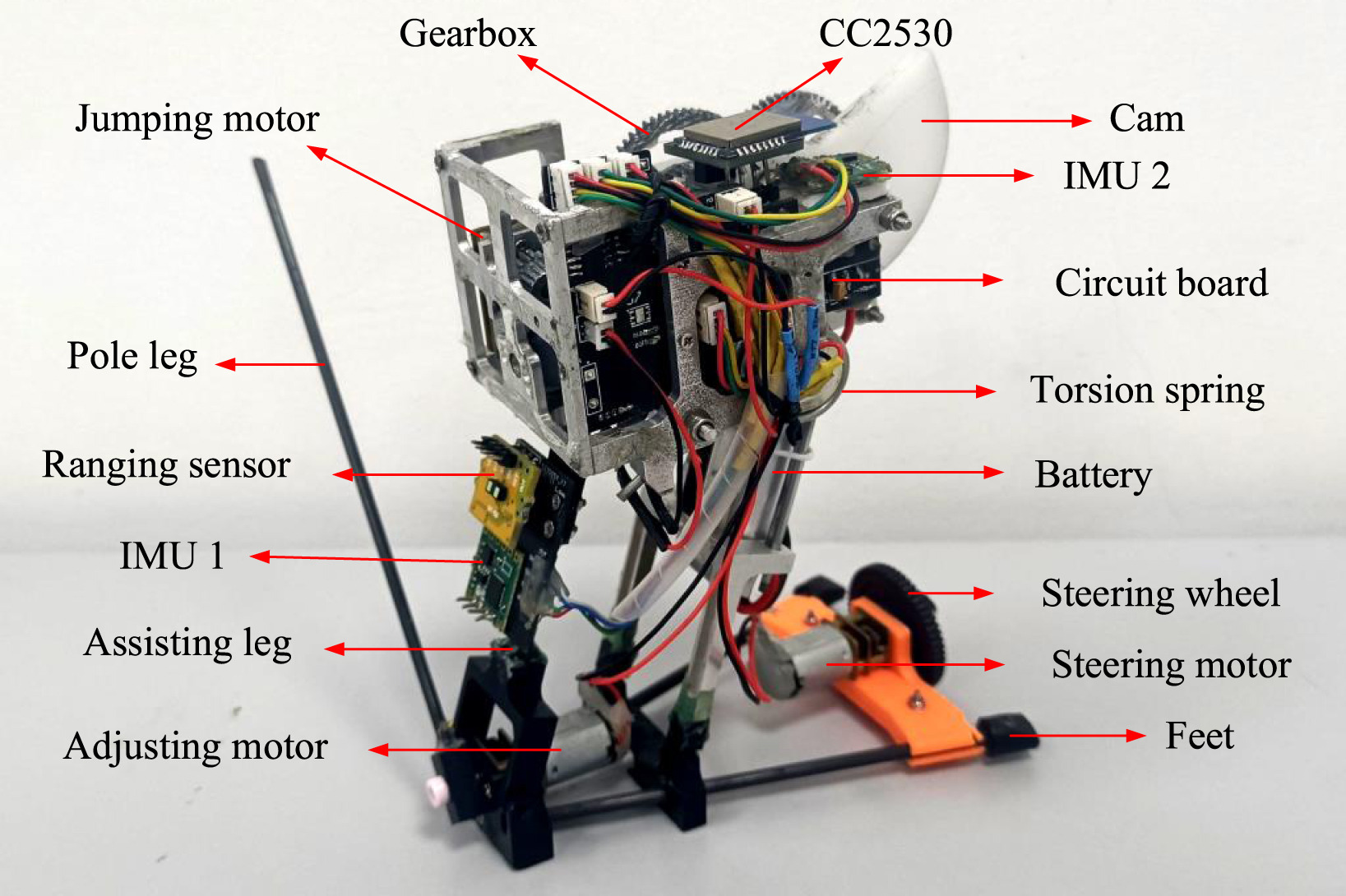
图2 MJR 样机
(1)障碍物宽度检测方法如图4所示。MJR 利用航向调节机构实现旋转,旋转过程中通过红外测距传感器与惯性测量单元(IMU 2)得到相应的水平距离和偏航角。d1和d2分别是 MJR 沿顺时针和逆时针方向旋转时,测距值发生第一次突变的数值,根据记录的边角信息以及余弦定理可得障碍物宽度:

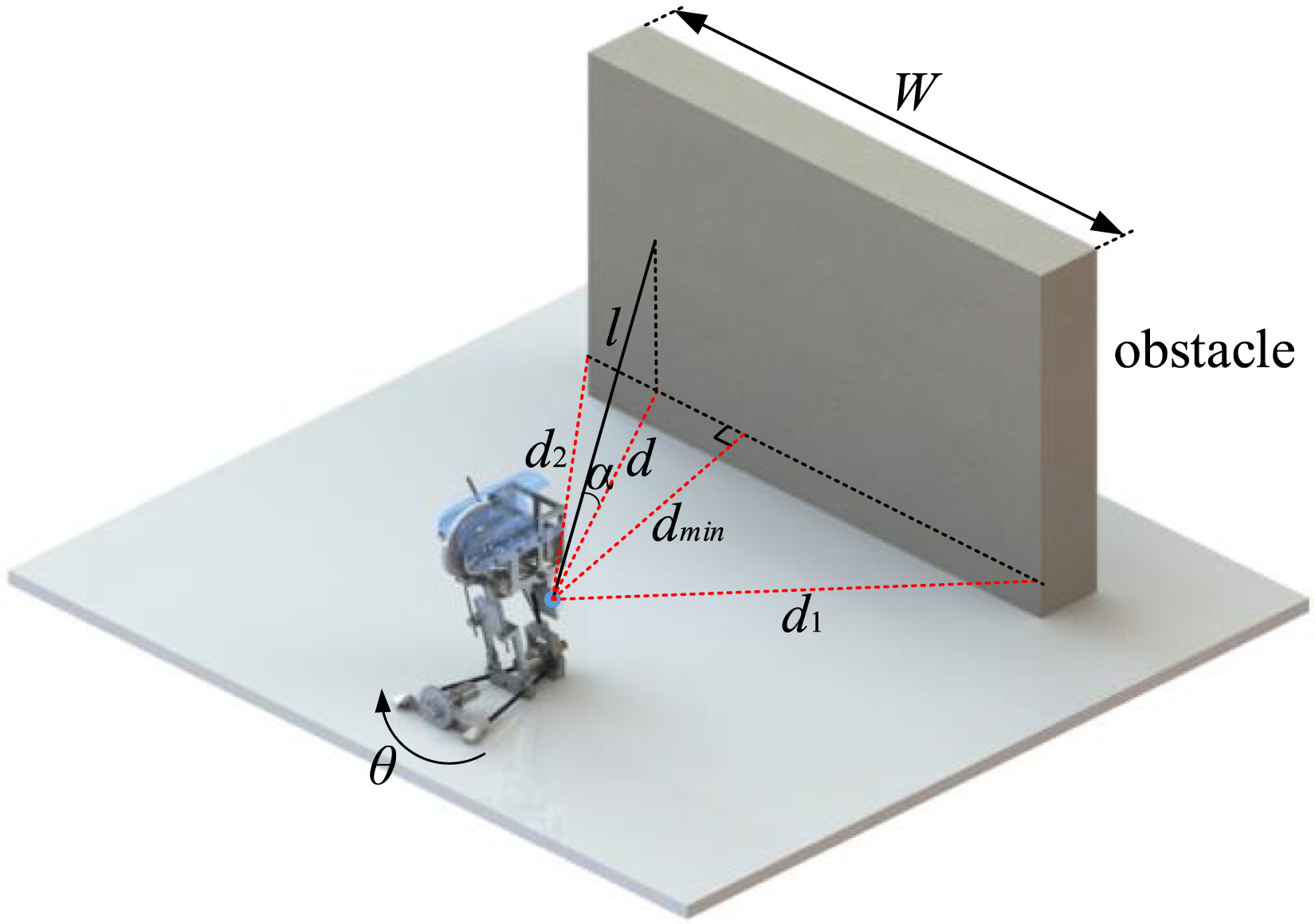
图4 障碍物宽度检测示意图
(2)障碍物高度检测方法如图5所示。将MJR调整至正对障碍物,压缩扭簧改变红外测距传感器俯仰角,距离值第一次发生突变的位置即为障碍物的上边界。根据距离值l1与角度α1可得到障碍物高度为

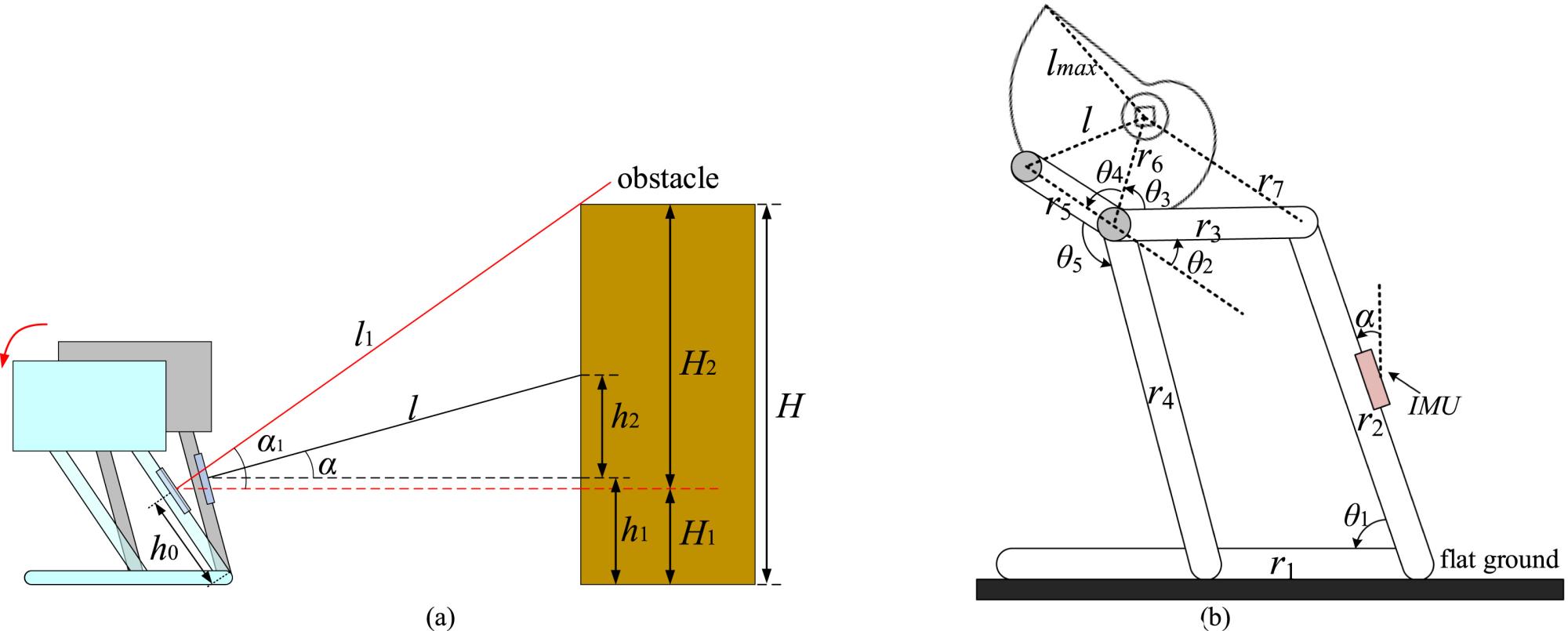
图5 障碍物高度检测示意图
(a)障碍物高度检测原理(b)MJR 机构间的角度关系
在高度检测中,需要知道扭簧压缩的状态,以避免MJR因为凸轮旋转过多出现中途起跳的情况。惯性测量单元(IMU1)测得的辅助腿倾角为α,当凸轮未转到临界位置,即l<lmax时凸轮处于安全状态(图3(b) )。因此α需要满足:
代入相关参数,可得本文倾角α的安全范围是-5°到35°(垂直为0°,前倾为负)。
(二)MJR 自主爬楼梯算法包含机器人相对楼梯位置检测、楼梯深度估计和2种弹跳策略,如图7所示。
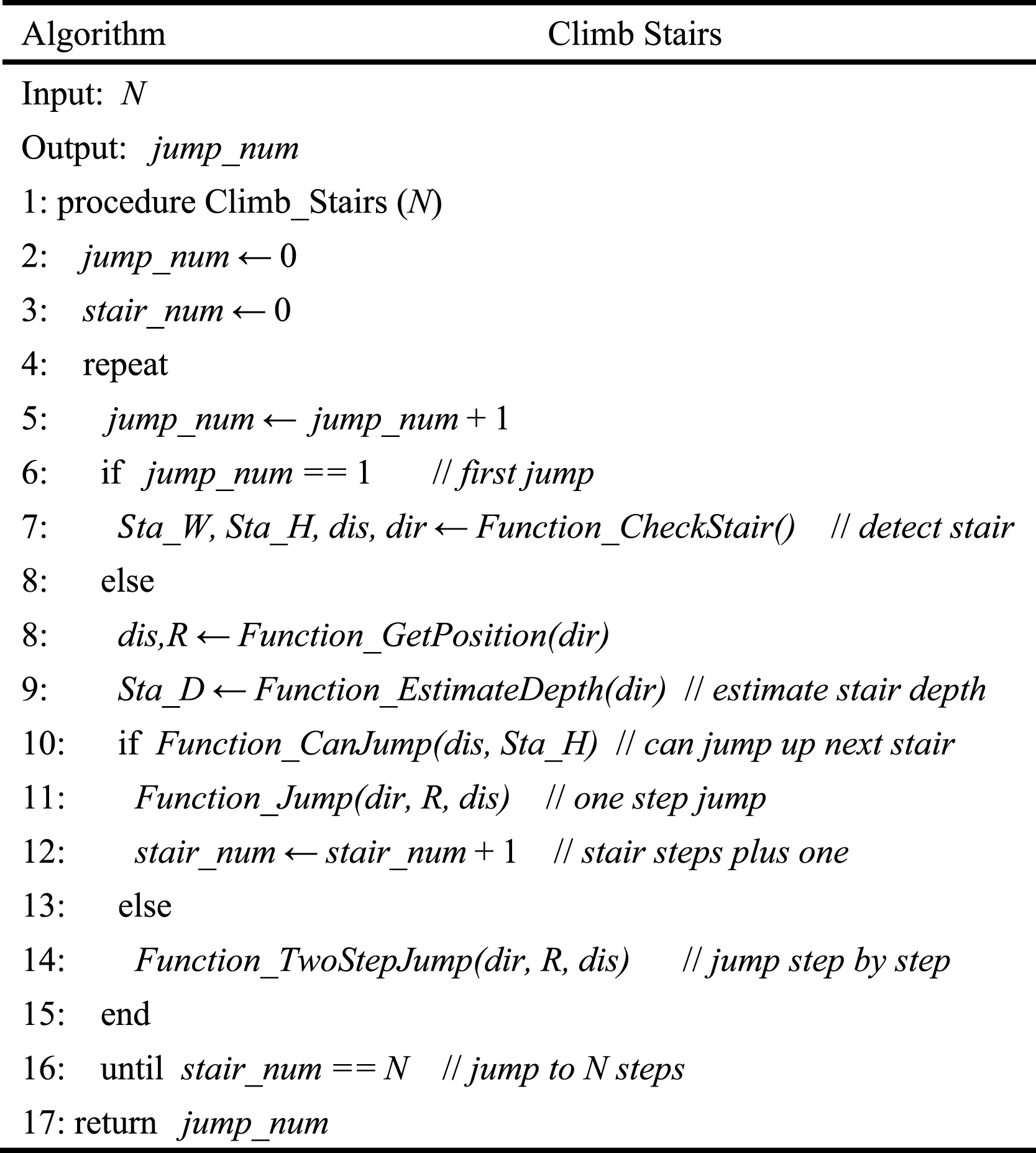
图7 MJR 爬楼梯算法图
(1)机器人相对楼梯位置检测:MJR 跳上楼梯完成自复位后,测得其到下一级台阶距离 d1,MJR 沿顺时针旋转过程中测距值第一次发生突变的数值 d2 为阶梯的右边界,可得 MJR 偏离中心线的距离:

(2)楼梯深度估计:当 MJR 跳上楼梯时,根据已知的跳跃曲线和误差模型可以得到落点位置,结合下一级台阶距离即可估计出当前台阶的深度。
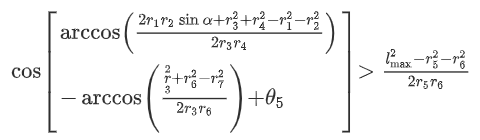
(3)根据楼梯的高度可求得 MJR 能跳上楼梯的最大距离,将它设定为跳跃边界。当 MJR 在弹跳边界内则采用一步跳策略,适当调整机器人的朝向,保证其落点尽量靠近中线(图8)。

图8 MJR 在弹跳边界内时弹跳演示
当 MJR 在边界外则采用两步跳策略,即机器人根据自身位置,先进行一次预跳跃,缩短其到下一级台阶的距离,然后执行一步跳策略(图9)。

图9 MJR 在弹跳边界外时弹跳演示
(三)本文在3层楼梯上进行了实际实验,在距离楼梯5 cm、10 cm、15 cm和20 cm处进行宽度和高度检测的结果分别如图11、12所示。机器人在距离楼梯5 cm处宽度检测误差较大,且无法检测出楼梯高度,另外3种距离下的检测结果均能满足爬楼梯任务的精度要求。
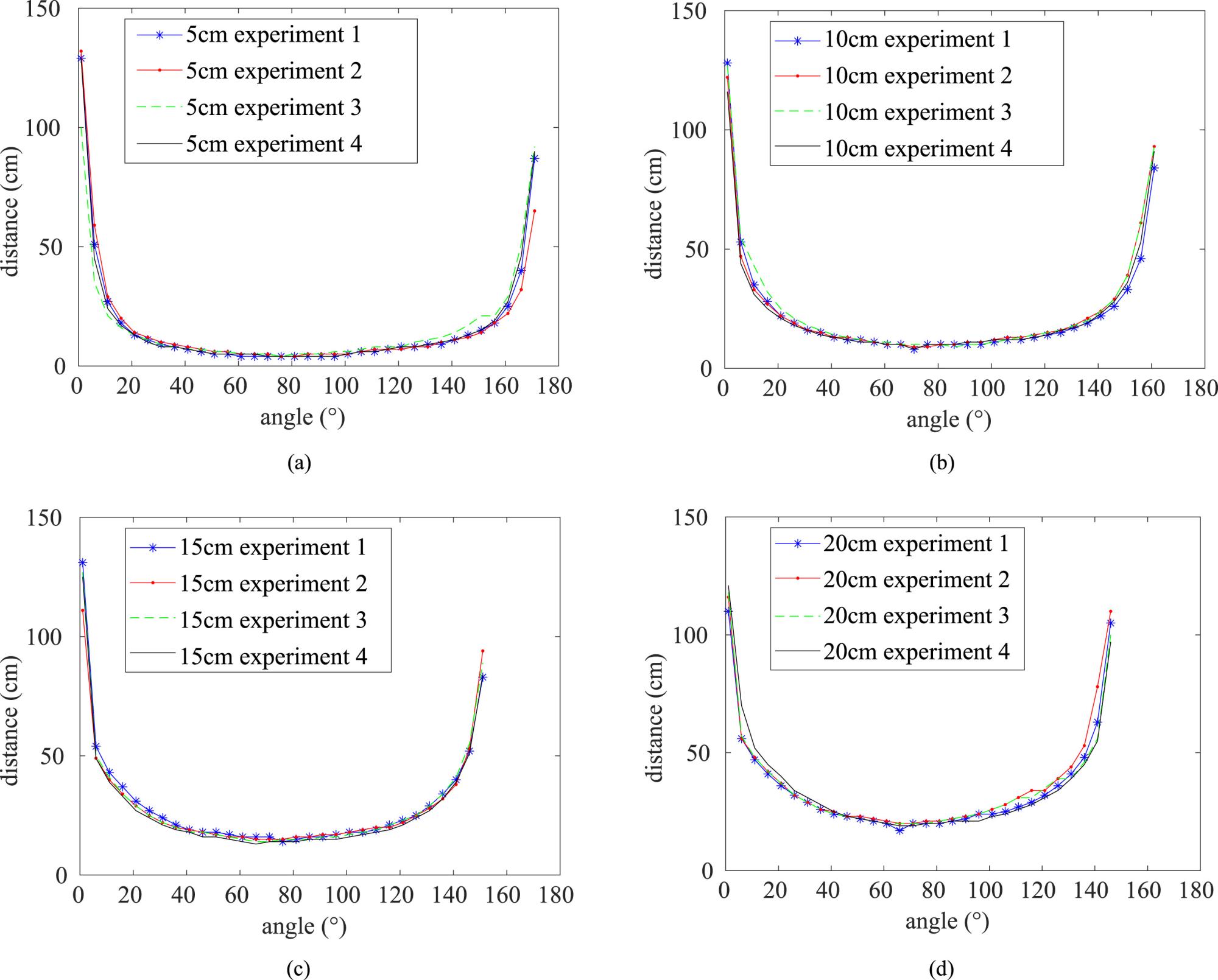
图11 楼梯宽度检测测距曲线
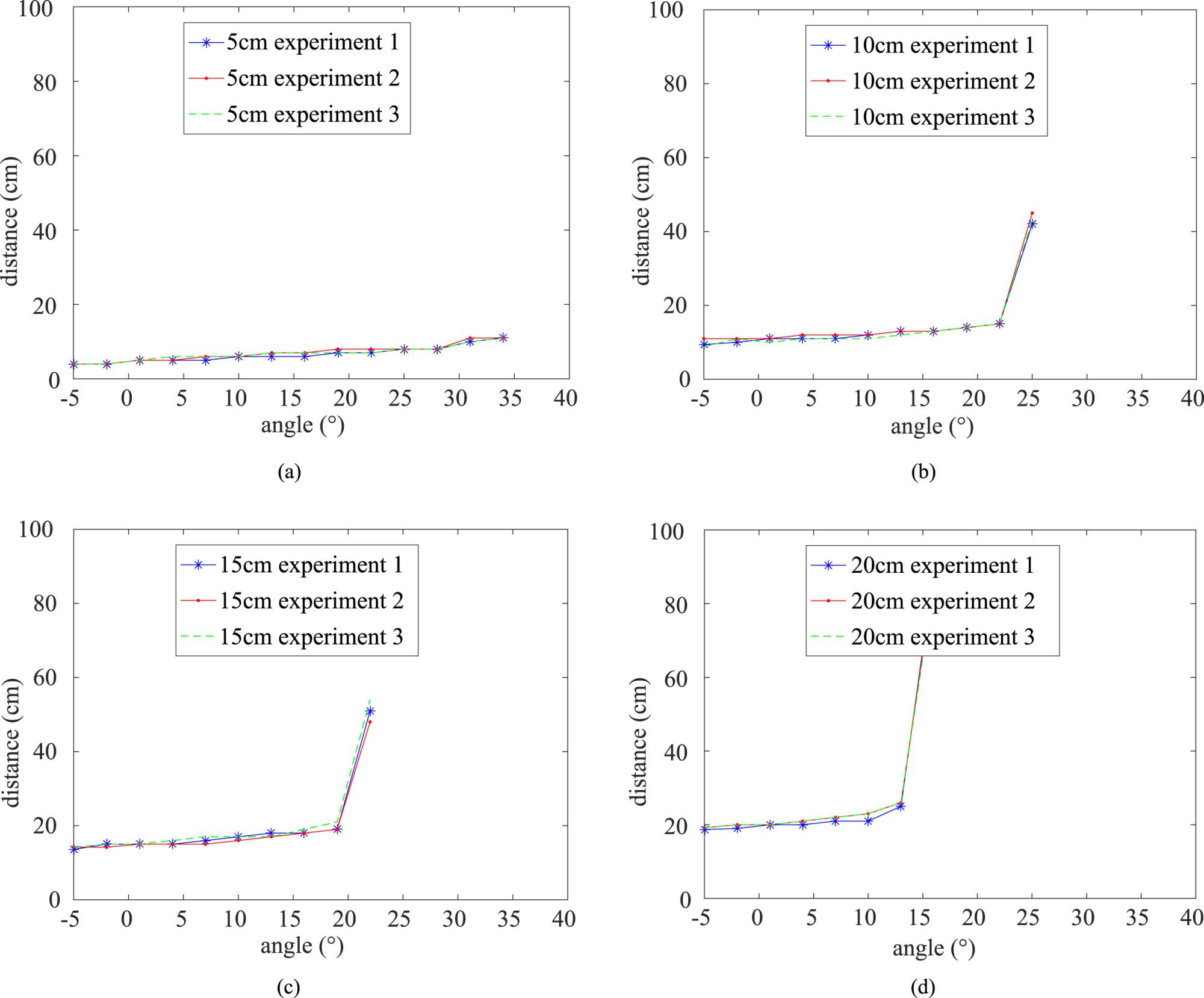
图12 楼梯高度检测测距曲线
机器人相对于楼梯位置的检测结果如图14所示,在楼梯上任意3个位置进行位置检测,检测误差都小于10%。
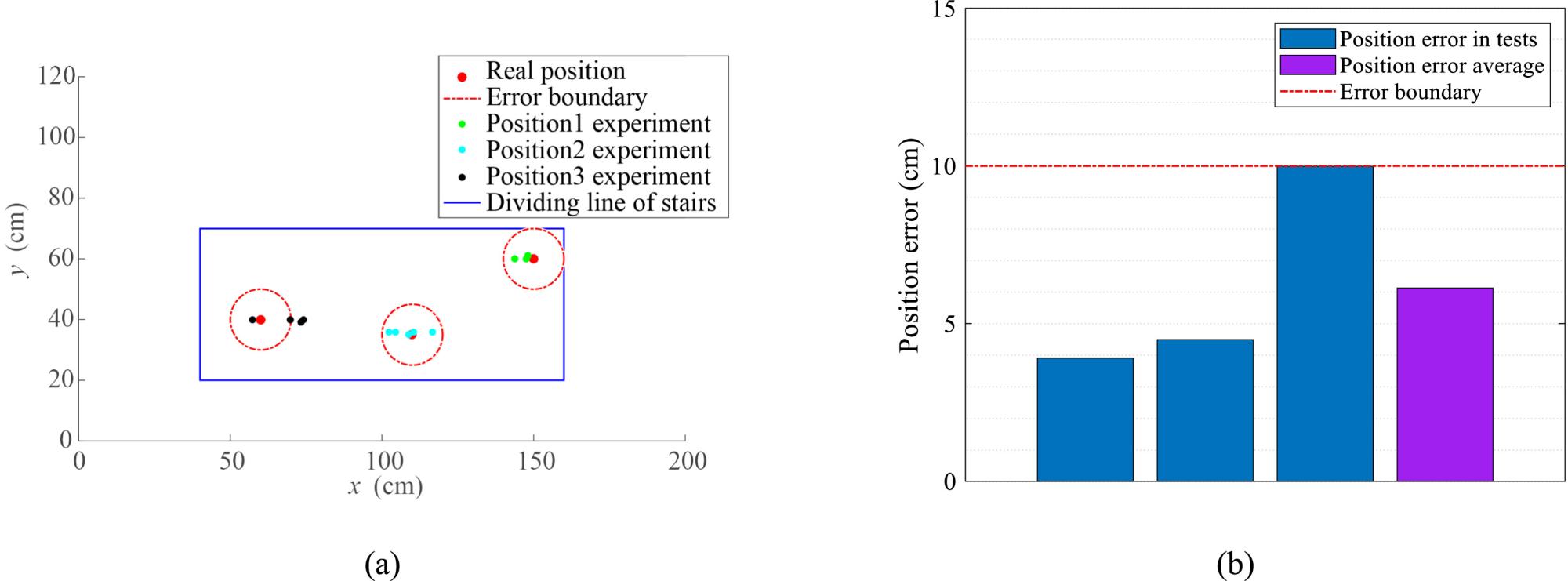
图14 MJR 位置检测结果
MJR 爬楼梯的运动序列图如图15所示,机器人可以根据自身位置进行航向调整。
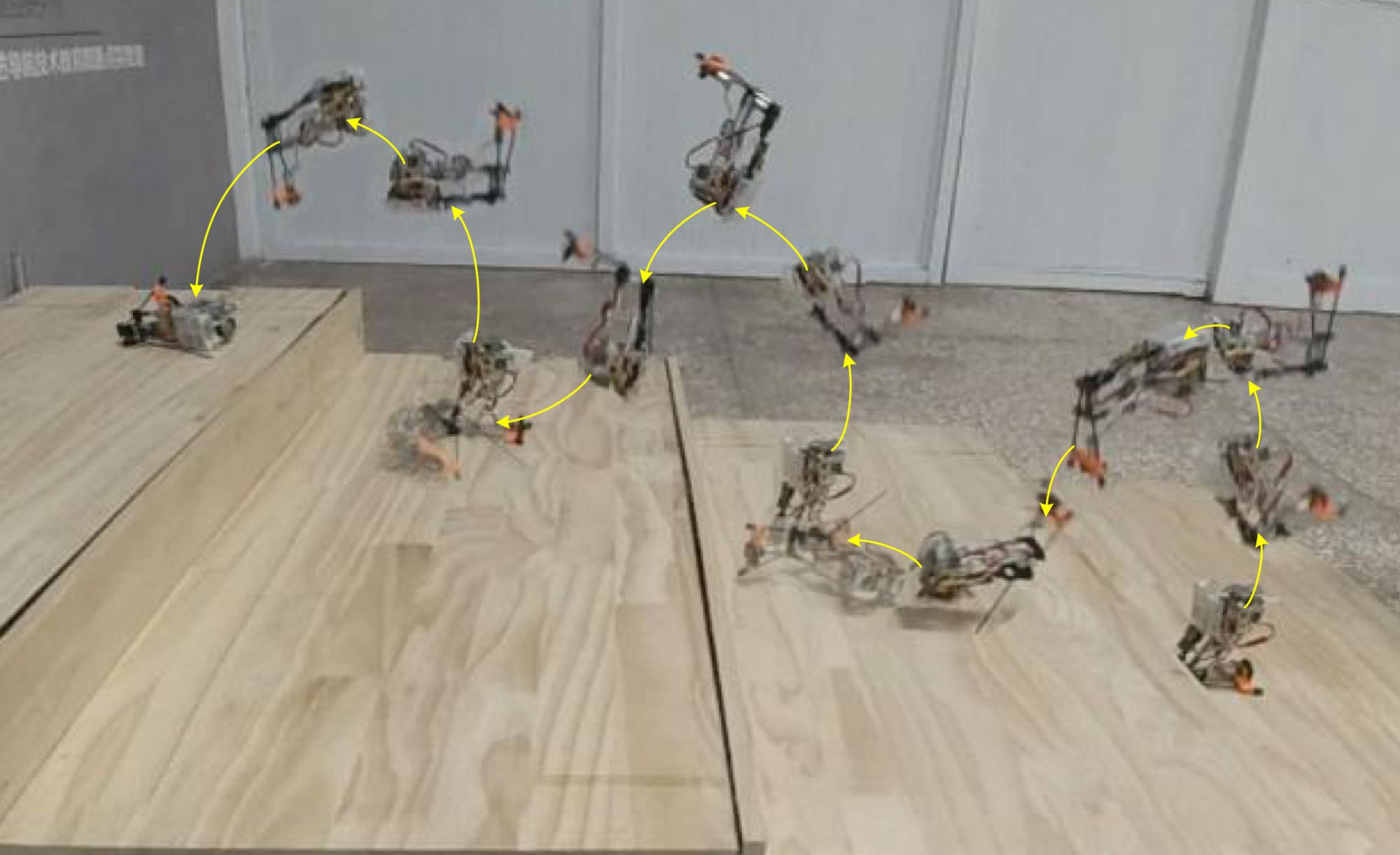
图15 MJR 爬楼梯运动序列图
MJR 在爬楼梯过程中通过无线传感器网络实时传输数据至上位机,上位机根据相关信息实时绘制当前环境的模型,研究人员可以实时监测 MJR 的爬楼梯状态和环境信息,如图18所示。本文共进行了40次实验,成功率可达55%。
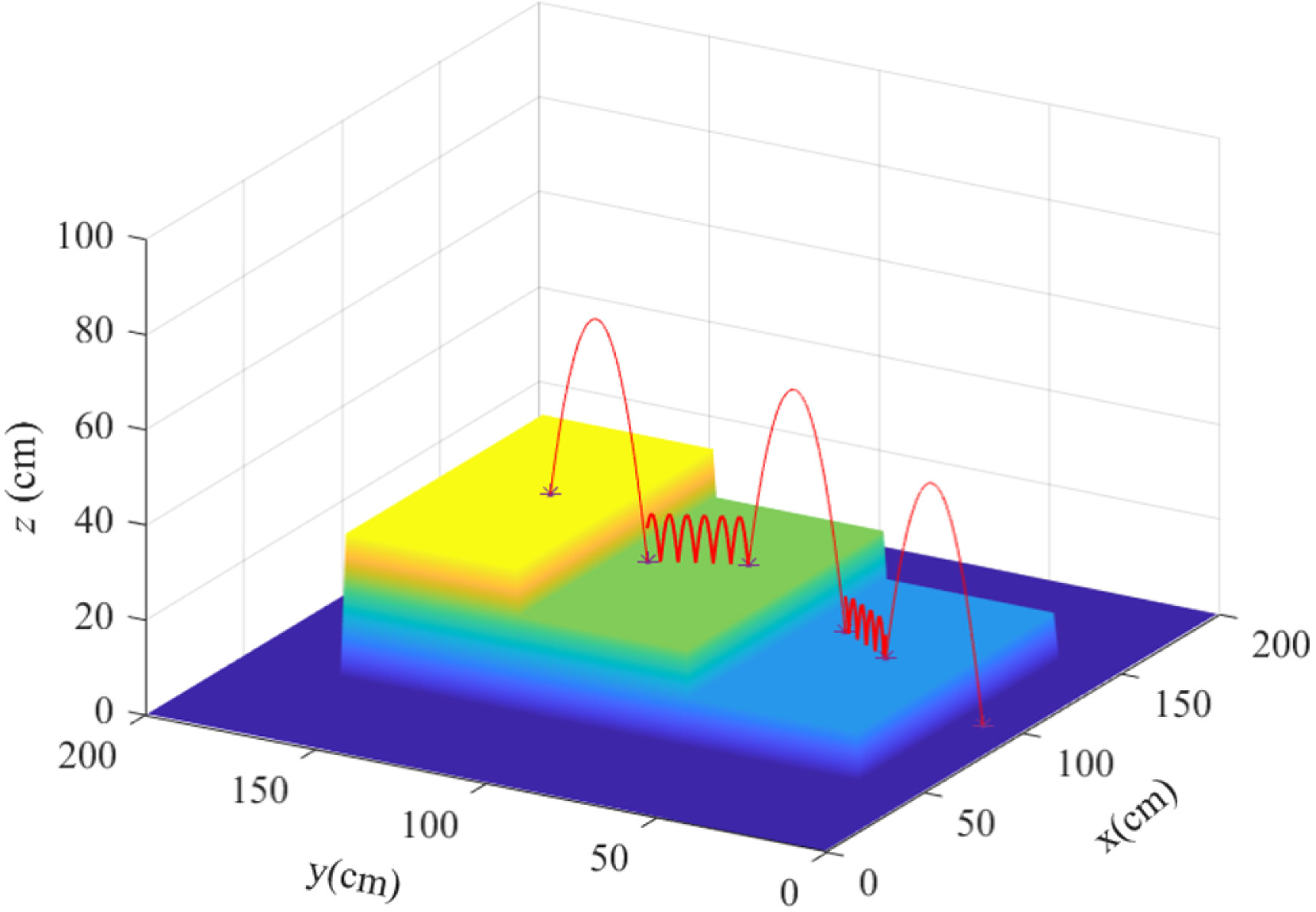
图18 楼梯模型和 MJR 的运动轨迹
综上,本文提出的 MJR 障碍物检测和自主爬楼梯算法能实现有限资源环境下微型移动机器人的环境感知和障碍物克服,为微型移动机器人的实际应用提供了理论支持。
【作者信息】
Yaning Zhang1, Jun Zhang1,*,Bohuai Chen1,Haoyun Chen1,Aiguo Song1
1 The State Key Laboratory of Bioelectronics, Jiangsu Key Lab of Remote Measurement and Control, School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China* Author to whom correspondence should be addressed: j.zhang@seu.edu.cn
【DOI】
https://doi.org/10.1016/j.birob.2022.100085
【全文链接】

期刊信息
Biomimetic Intelligence and Robotics (BIRob, e-ISSN 2667-3797, p-ISSN 2097-0242, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,入选2019年“中国科技期刊卓越行动计划”高起点新刊类项目(第一批),期刊已被DOAJ和Scopus数据库收录。
涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.sciencedirect.com/journal/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx

