2024年4月25日,由山东大学控制科学与工程学院主办,山东大学机器人研究中心承办的第六届仿生智能与机器人学术论坛暨山东大学-乐聚人形机器人联合创新研究中心揭牌仪式在山东济南顺利召开。
山东大学控制科学与工程学院副研究员张国腾主持本次论坛及揭牌仪式。山东大学控制科学与工程学院常务副院长王光臣出席会议,山东大学国家大学科技园管理办公室主任兼科学技术研究院副院长、《仿生智能与机器人(英文)》执行主编宋锐致辞。

宋锐主任致辞

揭牌仪式
本次论坛邀请来自清华大学、哈尔滨工业大学、深圳市人工智能与机器人研究院、乐聚(深圳)机器人技术有限公司等多家单位的专家学者,聚焦当前人形机器人研究的热点内容进行了深入交流和探讨。
清华大学自动化系机器人控制实验室主任、清华大学无人系统中心类脑机器人中心主任赵明国教授以“受人类中枢神经系统启发的运动规划与控制”为题,介绍了人类控制回路的神经传导机理,重点讲述了基于中枢神经系统的仿生运动控制模式,并分享了团队的最新研究成果。

赵明国主任作报告
哈尔滨工业大学机电工程学院研究员、松江实验室副主任倪风雷在“人形机器人机械臂与灵巧手技术”的报告中,梳理了国内外人形机器人臂手研究的发展历程与现状,并从多感知仿人臂手设计、拟人运动规划技术、性能评价与产业化推广、物体多模感知与自主操作等方面详细分析了人形机器人机械臂与灵巧手的主要研究内容。
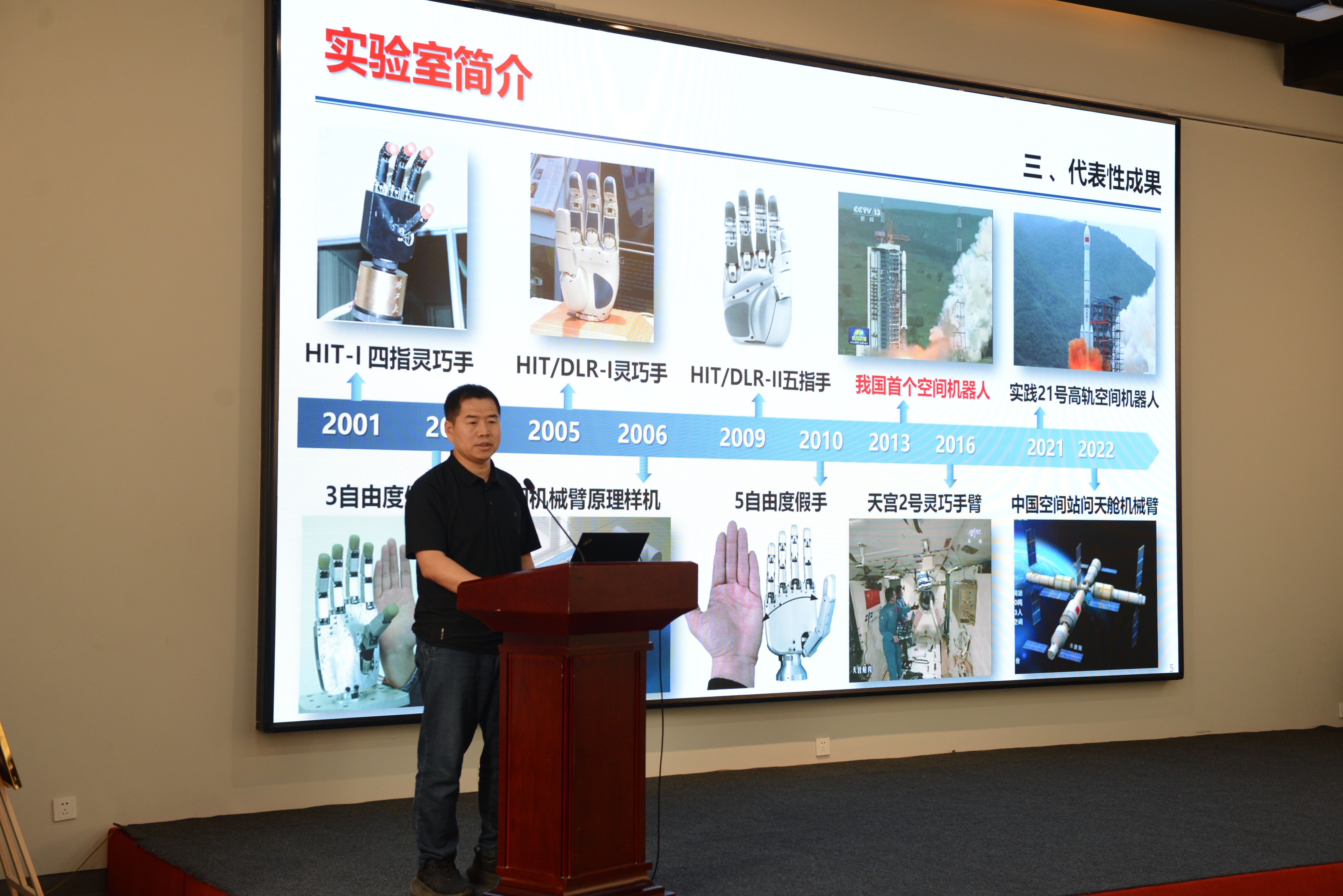
倪风雷副主任作报告
深圳市人工智能与机器人研究院副研究员张添威以“人形机器人视觉感知研究的挑战和机遇”为题,分享了多个实际项目开发案例,探讨并总结了计算机视觉在人形机器人领域的应用场景,展望了视觉控制用于对抗场景动态和自身动态以及触觉、听觉、力觉和动态视觉的多维度感知等方面的发展前景。

张添威副研究员作报告
乐聚(深圳)机器人技术有限公司算法总监何治成的报告题目是 “全身动量控制的人形机器人:行走、跳跃与扰动抵抗”,分享了灵动与自然的运动生成方法,以及基于动量方法进行机器人控制,同时也介绍了乐聚KUAVO机器人开源生态的发展方向。

何治成博士作报告
山东大学控制科学与工程学院张国腾副研究员从“双足机器人运动控制之我见”的角度,介绍了山东大学机器人研究中心在腿足式机器人领域的最新研究进展,探讨了基于倒立摆模型的传统控制方法、基于优化和学习的控制方法的优、缺点,以及这些方法在机器人领域的应用实践等。

张国腾副研究员作报告
会议最后组织了BIRob“人形机器人专题”研讨。《仿生智能与机器人(英文)》学术编辑张勤教授介绍了期刊发展现状和专题的组织情况,与会人员围绕提升约稿质量、扩大专题影响力、加强期刊宣传等议题建言献策,专题客座主编朱秋国副教授在总结发言中表示,高质量文章是期刊发展的基石,需要专家学者积极参与并与办刊团队紧密合作,携手为专题组织和期刊建设贡献力量。
乐聚(深圳)机器人技术有限公司CEO常琳、副总裁柯真东、销售实习副总监孙宪琦,中电科机器人有限公司人形机器人研发项目组组长蒋志勇受邀出席会议。《仿生智能与机器人(英文)》编辑部、山东大学机器人研究中心的部分师生参加了本次会议。

会议合影

