机器人开放服务平台
证书查询
中心邮箱
山大邮箱
图书馆
信息服务
财务系统
研究生系统
软件平台
校外vpn
首页
中心简介
中心概况
组织架构
管理委员会
发展历程
信息动态
通知公告
新闻动态
师资队伍
杰出人才
研究人员
博导团队
科学研究
研究方向
科研条件
科研成果
人才培养
博士生
硕士生
本科生
毕业生
合作交流
学术动态
成果推介
学术期刊
BIRob简介
编委会
期刊新闻
专刊资讯
联系我们
联系方式
招聘信息
科学研究
科研成果
研究方向
科研条件
场地设备
科研平台
产学研基地
科研成果
当前位置:
首页
>
科学研究
>
科研成果
2026-01-08
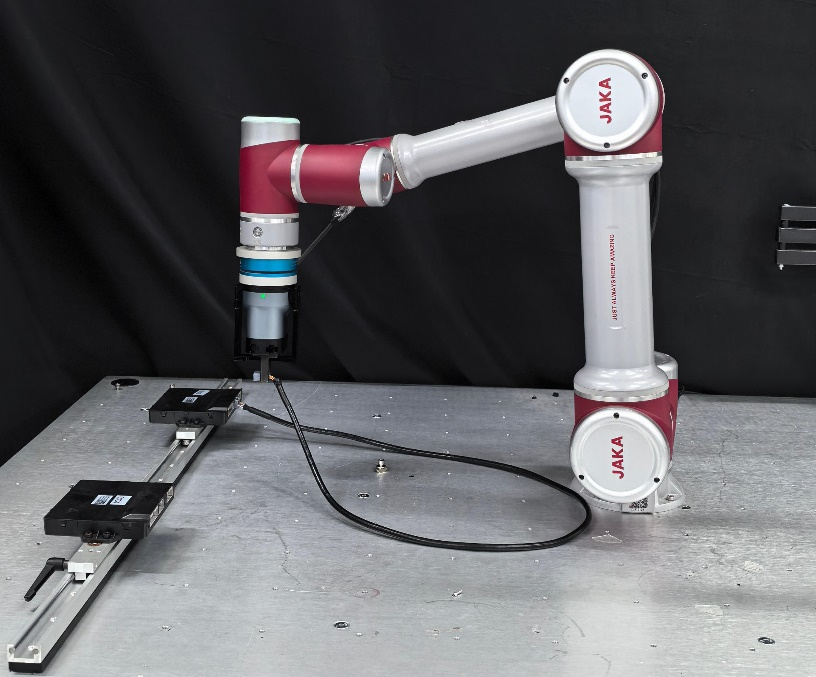
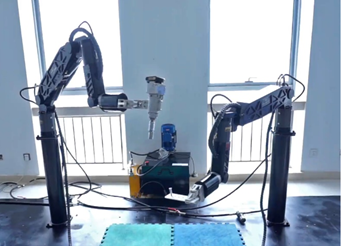
双臂机器人技能学习与柔性操作
2026-01-08
双足/人形机器人
2026-01-06
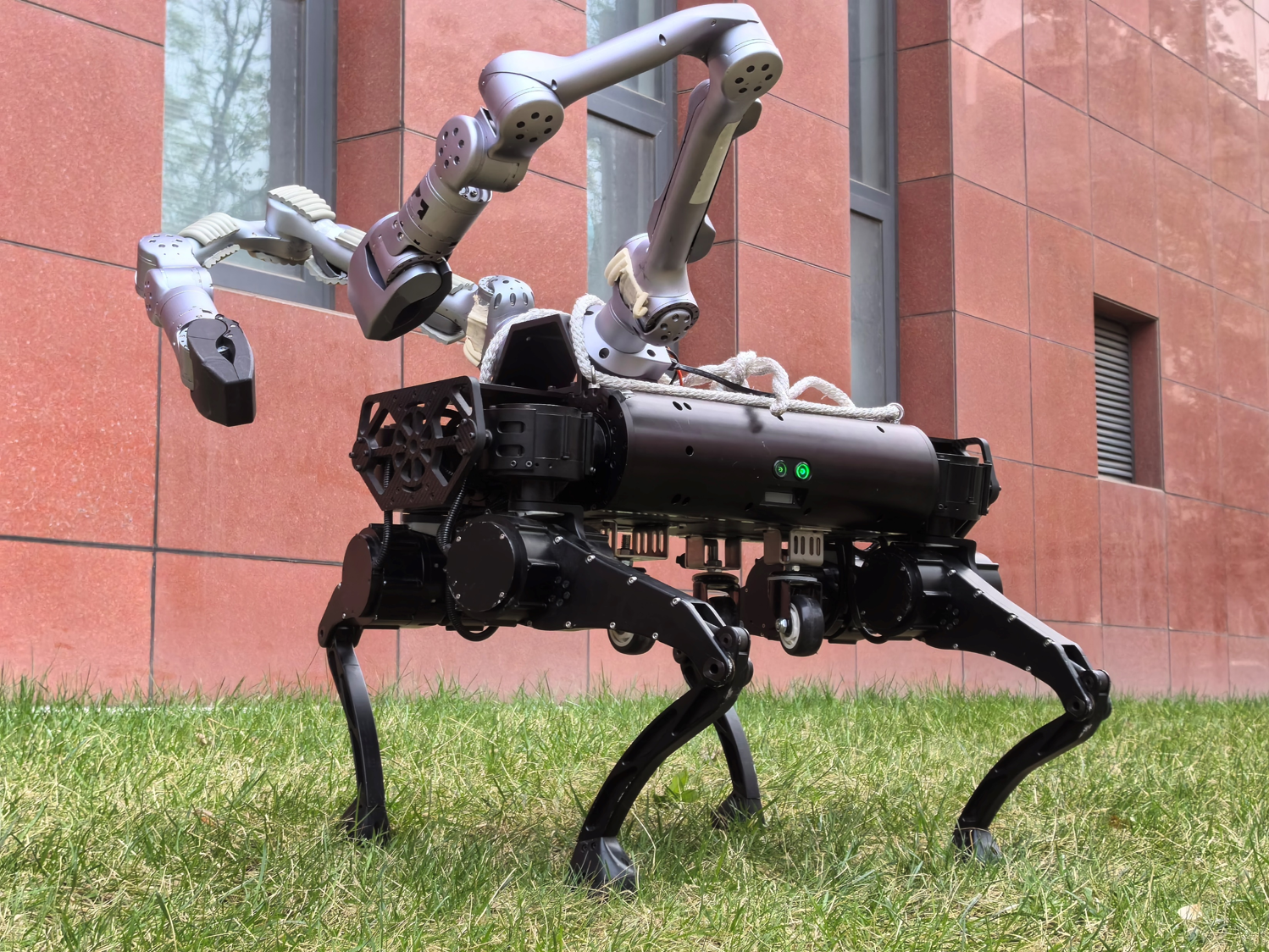
爬-步变构型四足双臂机器人
2023-06-12
警用应急处置机器人
2023-06-12
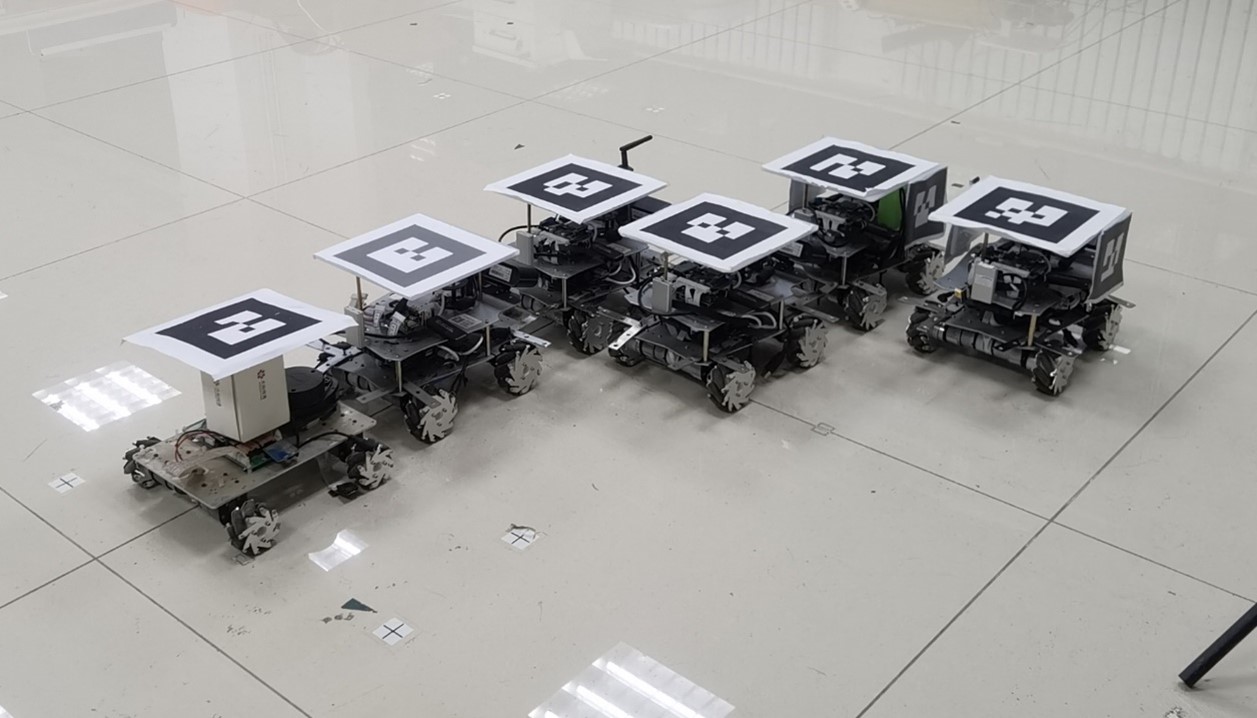
多机器人分布协同与群体智能技术
2023-06-12
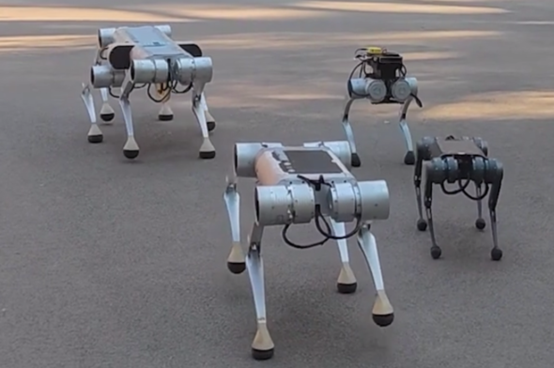
高性能电驱动腿足机器人
2020-11-04
迎宾讲解机器人
2020-08-27
力反馈主从遥操作液压机械臂
2020-08-27
消防侦察机器人
首页
上页
1
2
下页
尾页