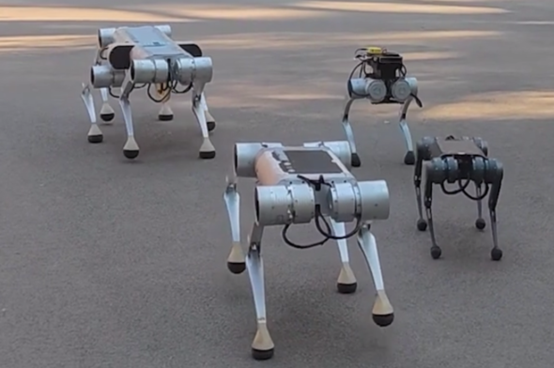
针对轮式和履带式移动机器人在陡直台阶或壕沟非连续地面、崎岖山地、建筑物灾后废墟等复杂地形环境中通过性不足的难题,对高动态腿足机器人驱动与控制技术开展研究,突破了电动腿足机器人高功率密度关节驱动、动态稳定运动规划与控制、多元感知与智能发育等多项关键技术,研制出国内首款高动态模块化点接触式双足机器人、兼备高速奔跑和跳跃的“形态-运动-感知-发育高仿生”小型舵机驱动四足机器人、复杂地形环境中高动态稳定运动和高负重/自重比的电动四足机器人、腿臂复用灵巧作业的六足机器人等样机,可适应草地、土地、沙石地、雪地等多种复杂地形,具备Trot、walk、bound等多种步态,四足机器人首次实现前空翻爆发式运动 ,“整体技术达到国际先进水平,在高功率密度一体化关节驱动单元、高负重/自重比系统优化等方面处于国际领先水平”, 腿足机器人在科研教育、智慧巡检、侦察探测、移动作业等场景具有广泛应用前景。

