针对复杂环境下多机器人集群运动规划、协同控制、编组优化等问题,研制了多机器人系统和机器人集群的协同规划和控制技术方法群。机器人编组过程中存在碰撞约束、速度加速度约束,以及编组过程的就位顺序约束,使得列队编组过程的优化规划和控制存在困难,提出了路径时间维多机器人近最优轨迹层次规划算法;随着多机器人数量增加,编组变构方案的数量呈现指数爆炸式增长,使得寻找最优解存在困难,提出了分层序列法来求解多目标最优问题;为提升多机器人同时空并行变构运动过程中的安全性和运动效率,提出了基于本地共识的多智能体分布式轨迹跟踪控制方法。以上方法群极大提升了群机器人在高动态环境下的生存能力、作业能力、灵活性和鲁棒性,推动多机器人系统在实际生产生活中的高效应用。
关键技术:
1.路径时间维多机器人近最优轨迹层次规划技术
将多机器人在欧几里得空间的运动转化为路径-时间坐标空间下的曲线,将机器人间的碰撞约束转化为路径-时间坐标空间下的静态障碍物,将速度加速度约束转化为曲线斜率,借助智能优化算法求解运动曲线,生成最优的就位顺序,实现了在复杂约束条件下的时间最短的列队编组运动。

图1 路径时间维空间下进行多机器人近最优轨迹规划路线图
2.分层序列法多目标变构优化
针对变构过程中的三个主要优化目标,选择移动智能体数量作为第一个最优指标,通过滑动重叠测试得到接近最优解的集合。针对智能体间断开对接机构最少的第二个指标,建立断开动作估计模型,建立搜索树结构,得到在接近最优解集上的最优解。对于所有智能体的移动距离最小的第三个指标,通过可视图算法估计第二步的最优解集内所有最优解的移动距离,从中选择距离最短的最优解作为整体优化问题的最优解。

图2 分层序列法求解最优变构策略路线图
3.基于本地共识的多机器人协同运动控制器
为每个智能体设计独立的分布式模型预测控制器,个体之间通过通信交换控制状态,并考虑的系统之间存在动态相互作用。在模型预测控制器目标函数中加入其他智能体的信息进行分布式控制后的目标函数,包含轨迹偏差项、控制量幅度项、避碰松弛因子项。构建优控制量与状态量约束、单个智能体的运动学约束、智能体邻间避碰约束。增加多智能体组元协调运动的本地共识,通过运动匹配约束来解决协调问题。
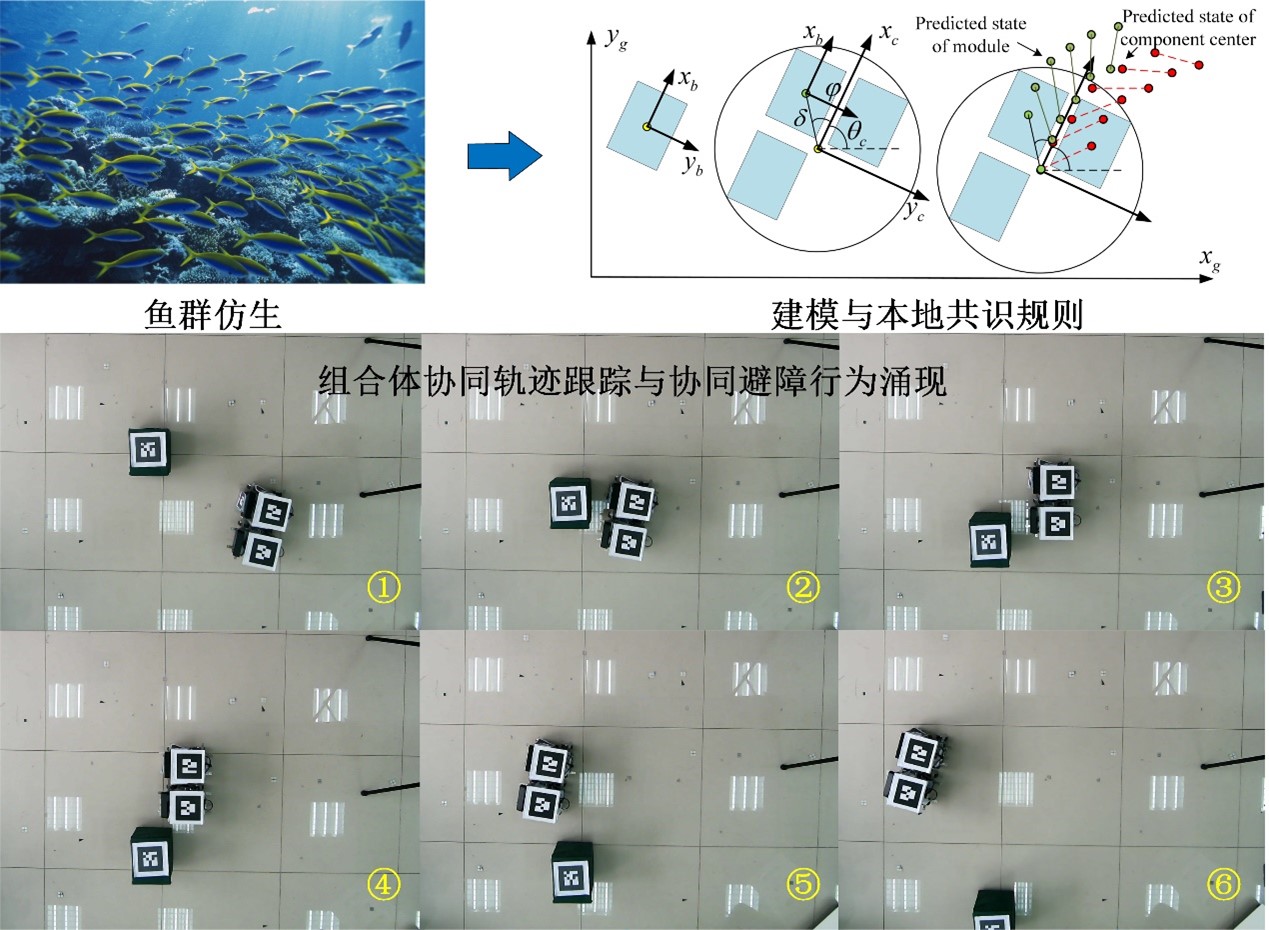
图3 仿生启发的基于本地共识的多智能体协同行为涌现
主要技术参数:
| 参数内容 |
技术参数 |
| 系统编组构型相对于给定构型的模块质心相对位置偏差 |
±1.715厘米 |
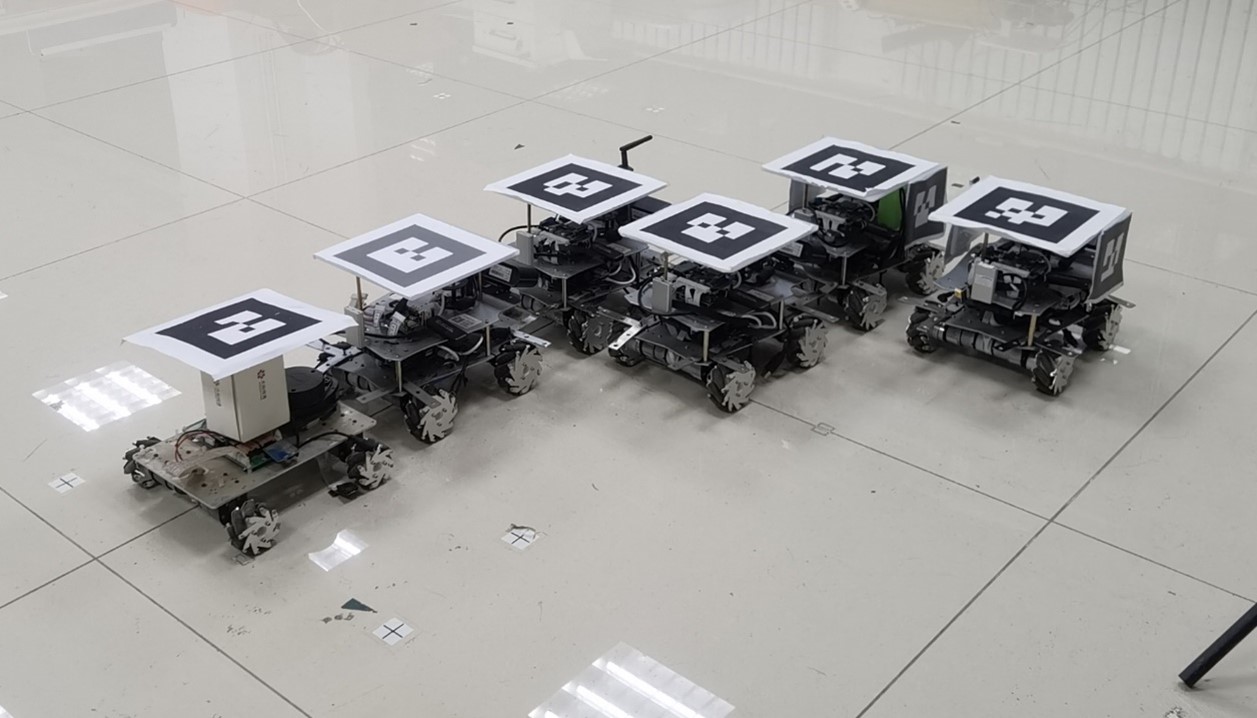
| 六个轮式模块的构型切换时间 |
47.8s |
| 编组变构运动模式 |
并行实时 |
| 软件平台要求 |
构型设定、构型数字化实时显示、启停控制功能 |

