视频赏析
内容摘要
猎豹作为奔跑速度最快的陆地动物,其形体结构、运动特征、控制机理对于高速四足机器人的研究具有重要借鉴意义。本文利用数字化重建技术对猎豹的高速运动机理进行分析。首先,参照猎豹的真实躯体尺寸和质量,建立了合理简化的猎豹虚拟模型;其次,通过生物学研究得到猎豹奔跑步态的足端轨迹数据,利用DH方法和拉格朗日法分别建立猎豹腿机构的运动学和动力学模型,在时间维度上对猎豹高速奔跑过程中各个关节的关节角、虚拟腿长、腿部与地面接触角、腿部能量、关节力矩和腿机构操作度等参数进行对比分析,总结出具有一定工程指导意义的高速运动规律。
图文导读
文章首先依据猎豹高速奔跑的视频分帧结果,标定出代表性的关节以观察其运动,如图1所示。在此基础上,参照猎豹真实的躯体尺寸,进行数字化重建工作。为了在一定程度上降低分析复杂度,同时考虑结果在机器人领域的易用性,文章仅考虑猎豹在矢状面内的运动,将躯干视为一体化的刚性单元,重点关注其腿部的运动,简化为肱骨(股骨)段、尺骨(胫骨)段、掌骨(跖骨)段,对应的三个关节分别为肩(髋)关节、肘(膝)关节、腕(踝)关节。最终建立的数字化模型如图2所示。
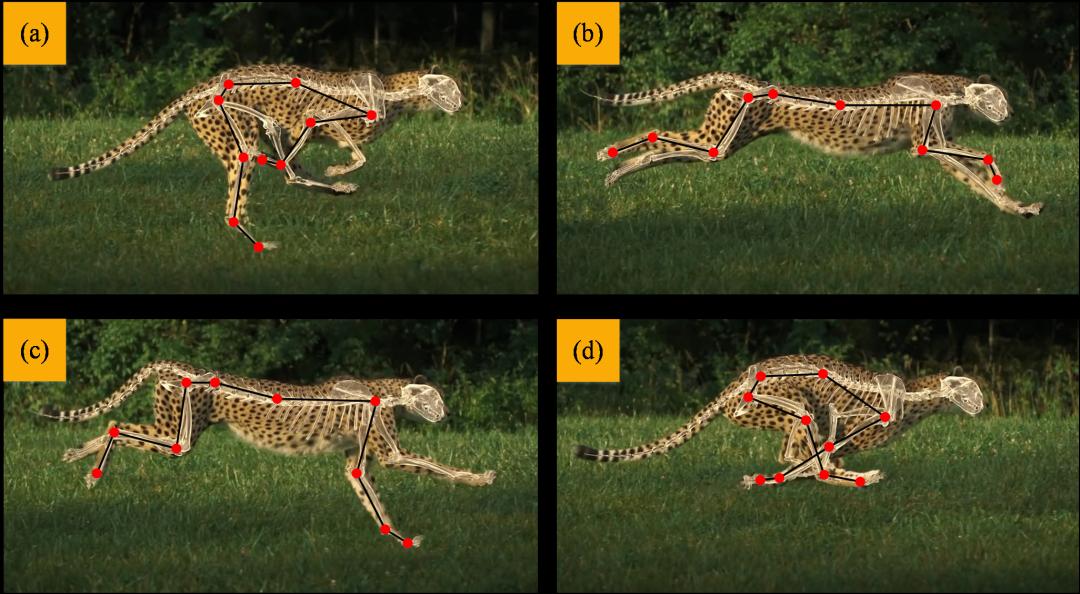
图1. 猎豹运动视频的分帧与特殊点标定
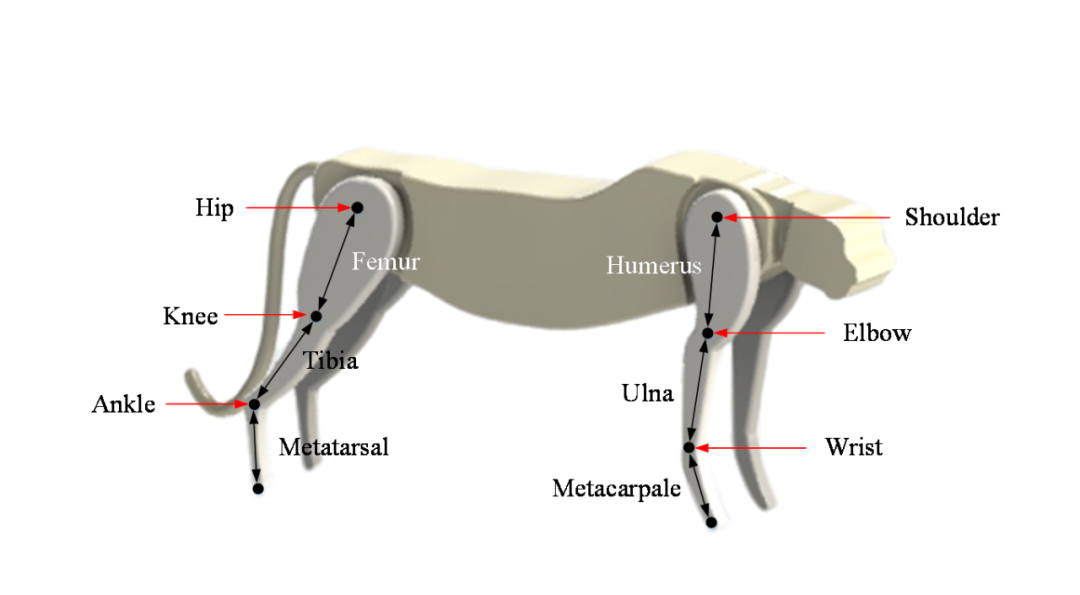
图2. 参照真实猎豹尺寸建立的数字化模型
生物学家Hildebrand在其以往的研究中将猎豹的单个运动周期均分为19份,本文在他的研究基础上,提取了猎豹的前肢和后肢在对应时刻各关节角的运动数据,并参照真实猎豹的躯体尺寸,重建了单周期内前后腿各段在各个时刻的位置,如图 3所示。
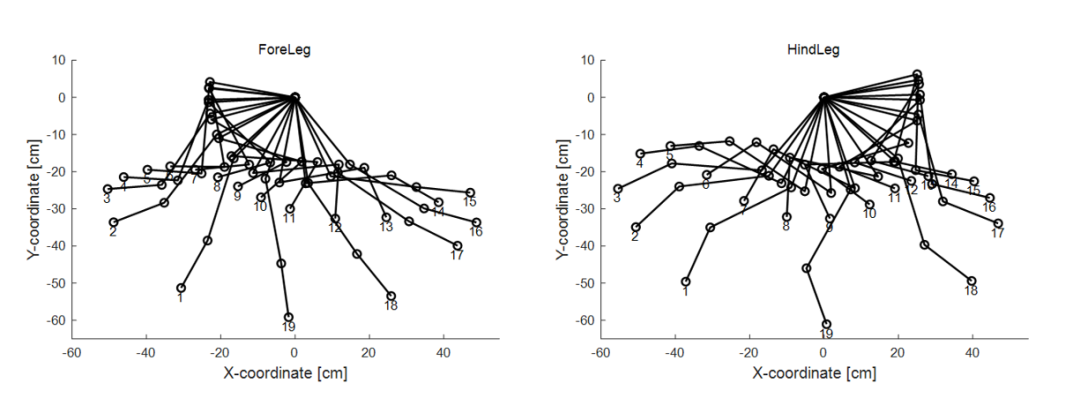
图3. 猎豹前、后腿单步态周期的运动过程
猎豹的足端轨迹整体呈现为“蚕豆”形状。文章根据猎豹腿部运动特征将足端轨迹分为4个阶段:跟随段(FT)、摆动段(PR)、回缩段(SR)、支撑段(ST),在支撑相和摆动相之间存在离地点(PTO)和触地点(PTD),跟随段和前摆段之间存在后极限点(PPE),前摆段和回缩段之间存在前极限点(PAE)。以猎豹后腿为例的足端轨迹分段如图 4所示。
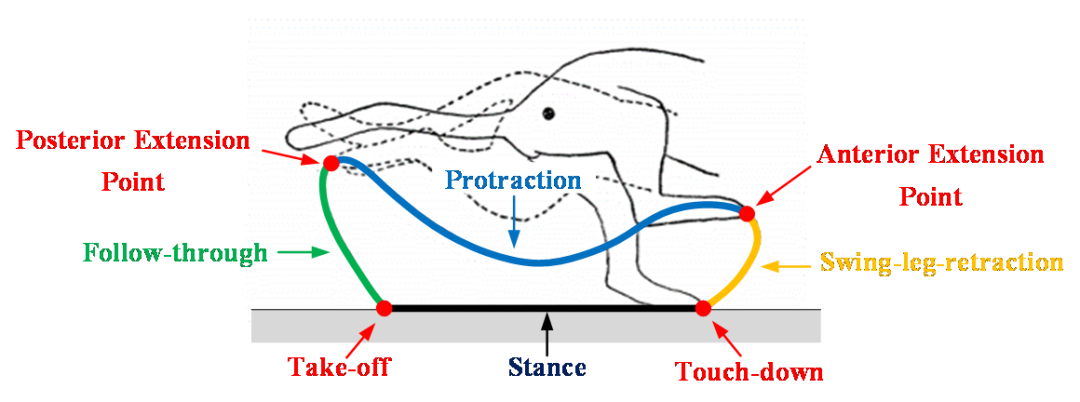
图4. 猎豹足端轨迹分段
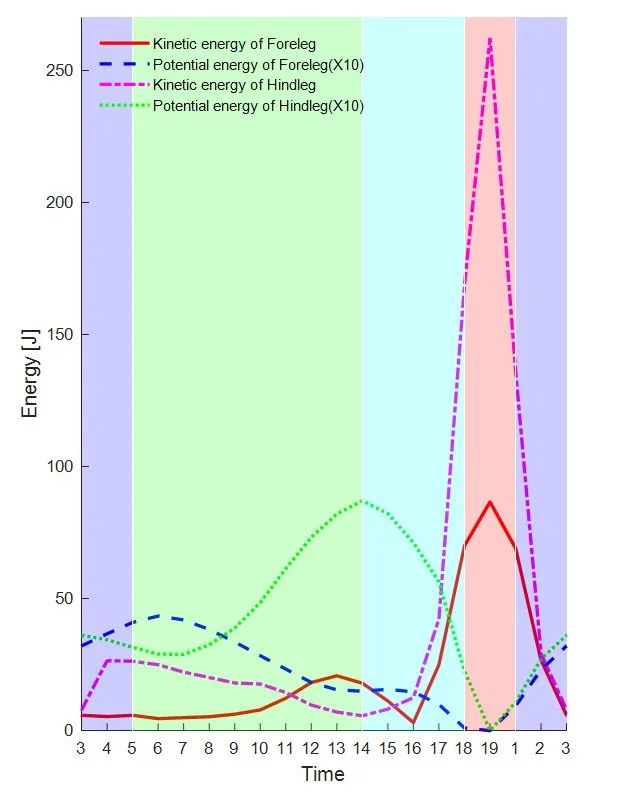
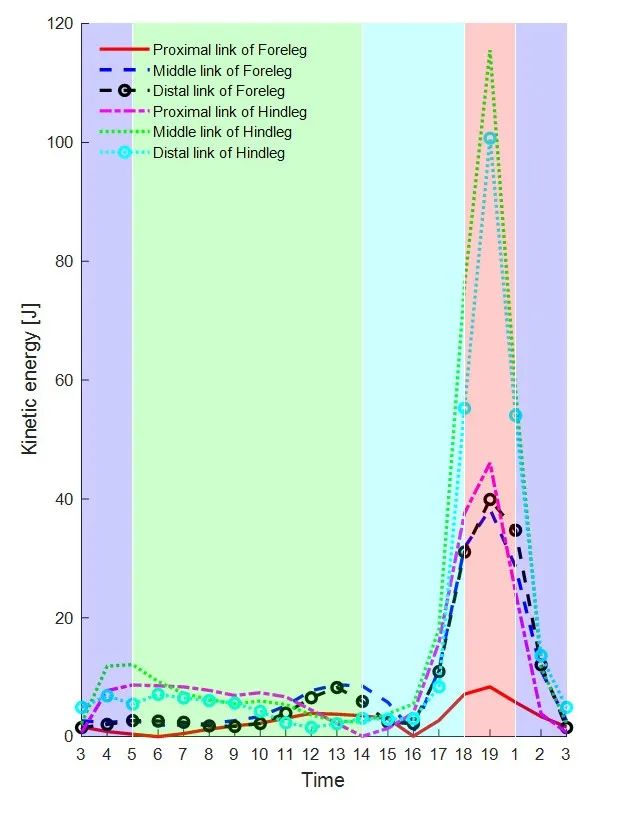
根据上述数据以及处理原则,文章利用机器人学方法建立猎豹腿部的运动学及动力学模型,对猎豹高速奔跑过程中各个关节的关节角、虚拟腿长、腿部与地面接触角、腿部能量、关节力矩和腿机构操作度等参数的变化过程进行分析。图6为猎豹前腿各关节角的单周期变化情况。图14为猎豹前后腿单周期动能和势能的变化情况以及腿部各段动能的变化情况。
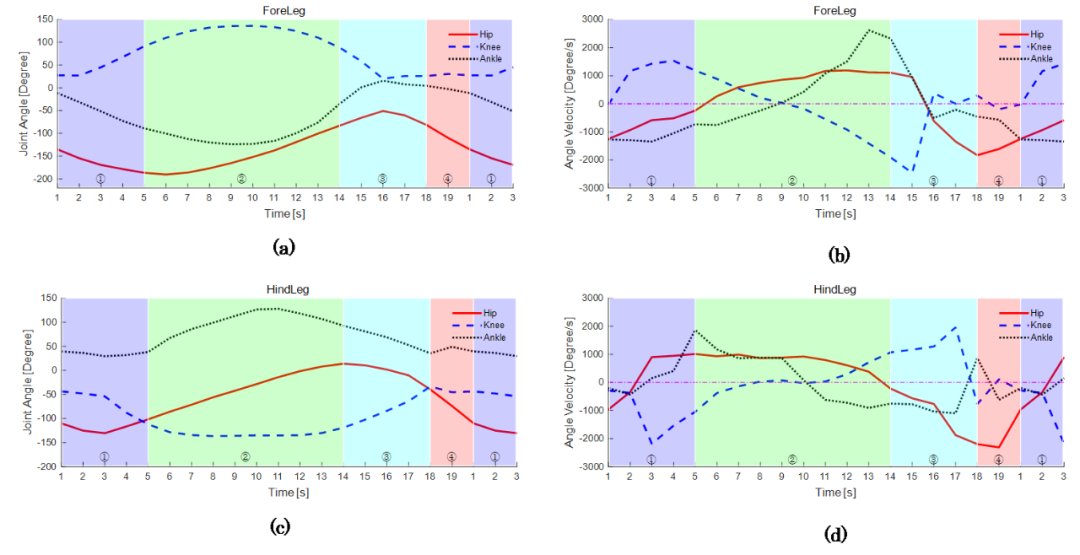
图6. 猎豹前后腿关节角度及角速度变化曲线
(a)
(b)
图14. 猎豹前后腿单周期能量变化曲线
文章的研究结果为仿猎豹四足机器人的设计搭建了仿生学桥梁,对探究猎豹的高速奔跑机理具有重要意义。
【作者信息】
Xiuli Zhang*, Chenliang Zhao, Zhongqi Xu, Senwei Huang
The School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044, China
* Corresponding author, E-mail address: zhangxl@bjtu.edu.cn
【DOI】
https://doi.org/10.1016/j.birob.2021.100033
【全文链接】