视频赏析
内容摘要
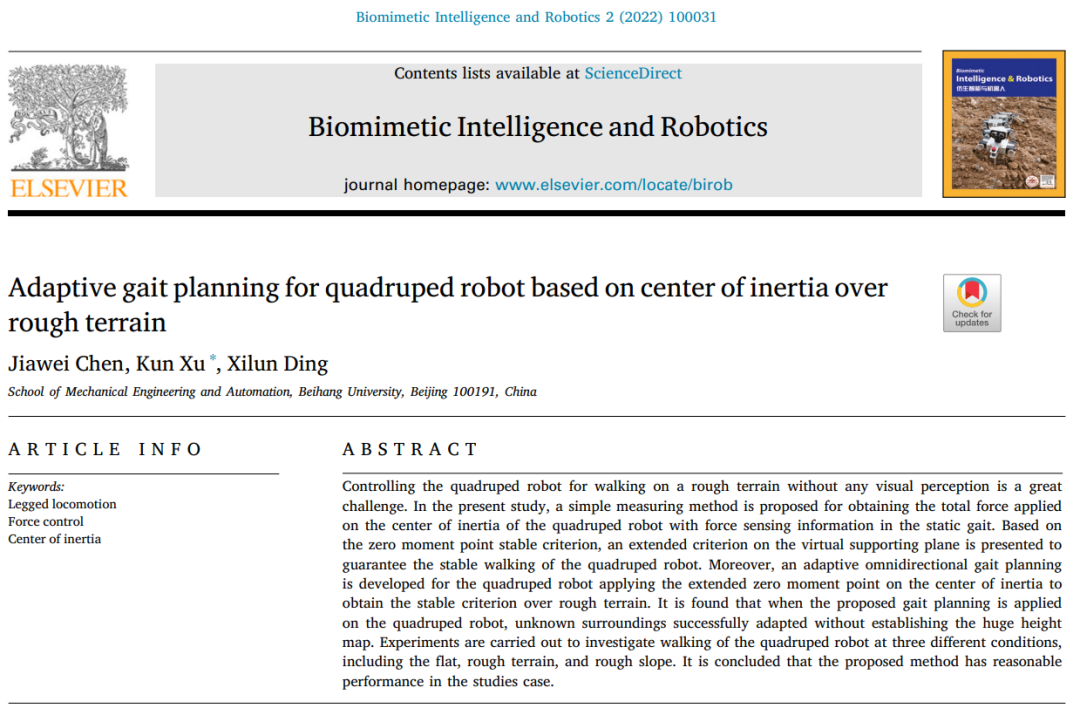
本文作者提出了一种四足机器人简单计算惯性中心和稳定判据的方法,该方法通过足底力直接计算惯性中心,相比于传统利用关节角度和机身惯性传感器方法,本文提出的方法更加准确和稳定。将计算方法应用于四足机器人的静态步态,设计了一种基于惯性中心的自适应步态,该步态可仅依靠足底力传感器实现稳定连续的行走。通过四足机器人分别在平地、崎岖不平的地面和崎岖不平的山坡上进行自适应步态运动实验,有效验证了惯性中心计算方法和自适应步态的可行性。文章的第一节介绍了研究背景;第二节提出了机器人从足底力计算惯性中心的方法;第三节介绍了基于惯性中心的自适应步态的运动规划和控制;第四节描述了基于惯性中心的自适应步态的四足机器人样机实验;最后一节为论文总结。
图文导读
在地形崎岖不平,且视觉和激光雷达等感知传感器无法正常工作条件下,尤其是在星球探测环境中,如何控制四足机器人的稳定行走是一个巨大的挑战。本文进行四足机器人仅依靠足底力感知进行运动和行走的研究。如图7所示,该机器人为爬虫类四足机器人,每条腿具有三个自由度,在足末端装有三维力传感器,机身装有惯性测量单元和控制器。机器人可以利用足底三维力传感器直接得到足底力,通过足底力计算机器人实时的惯性中心和稳定裕度。
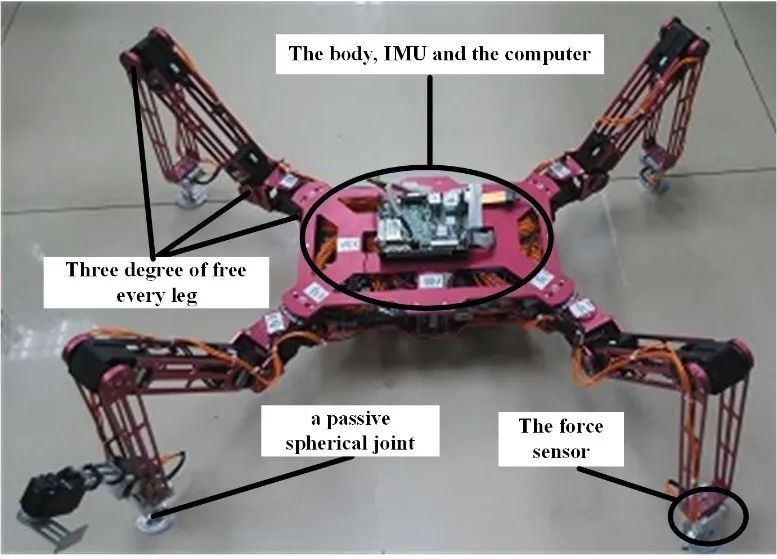
图7 文中提出的四足机器人样机
本文提出了自适应步态的整体运动规划(图4)和机身整体的控制方法(图6)。机器人根据当前的机身位姿和立足点,选择摆动腿,利用其它支撑腿计算虚拟平面用于机器人的稳定裕度计算,调整机身稳定裕度,移动机身到达最大稳定位置,摆动腿搜索可行的立足点(在此过程中,机器人实时计算惯性中心,并调整惯性中心保证稳定)。机器人的机身控制系统主要分为姿态控制器、高度控制器和水平位置控制器:姿态控制器在姿态指数映射空间下进行描述和控制;高度控制器根据机器人立足点的高度进行线性规划;机身水平位置控制器根据实时计算的惯性中心进行稳定调整。
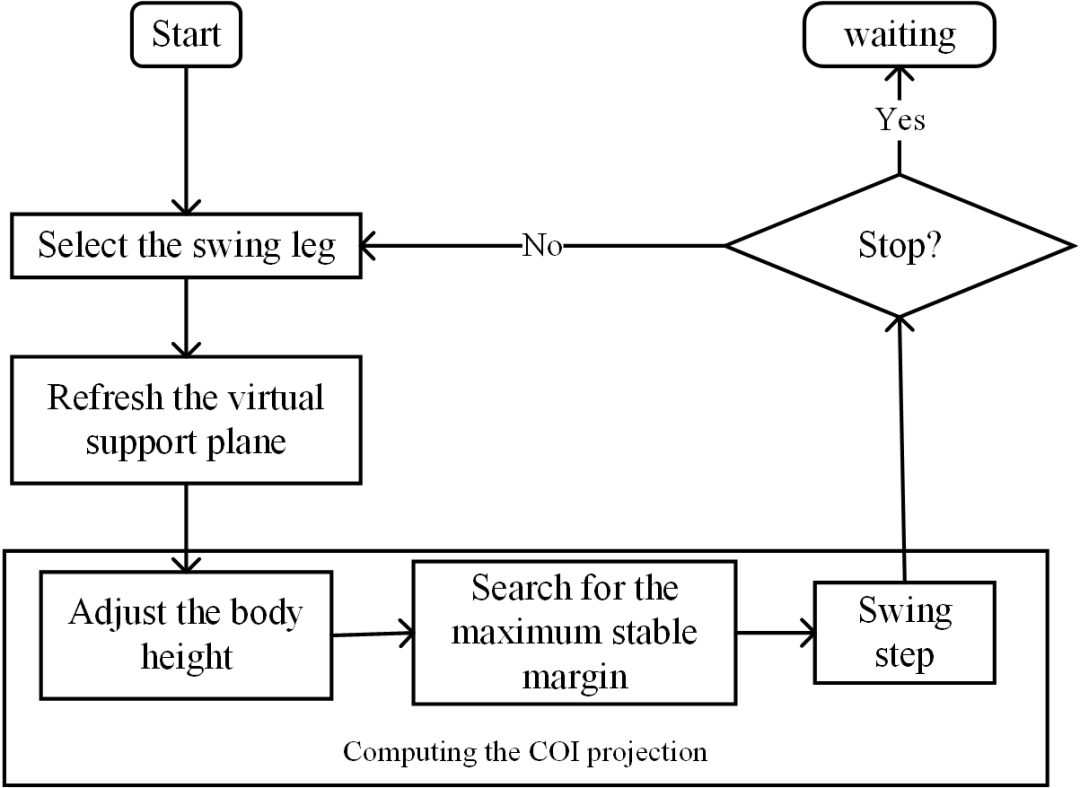
图4 机器人的步态运动规划流程图
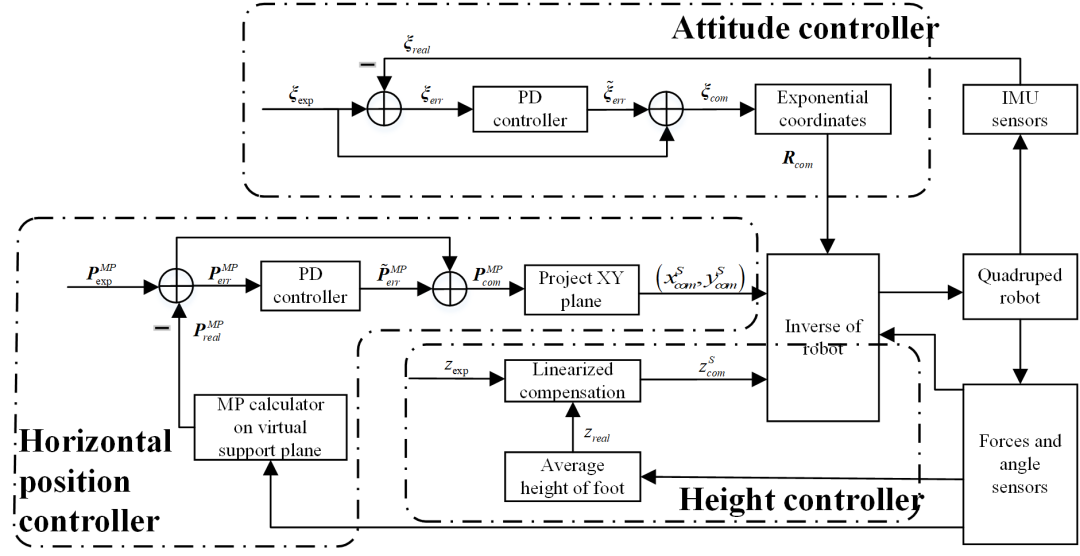
图6 机器人的运动控制系统
机器人分别在平地(图8d),崎岖不平的土地(图9c)和倾斜度为20°的土坡(图10c)进行实验,结果验证了该自适应步态的可行性。
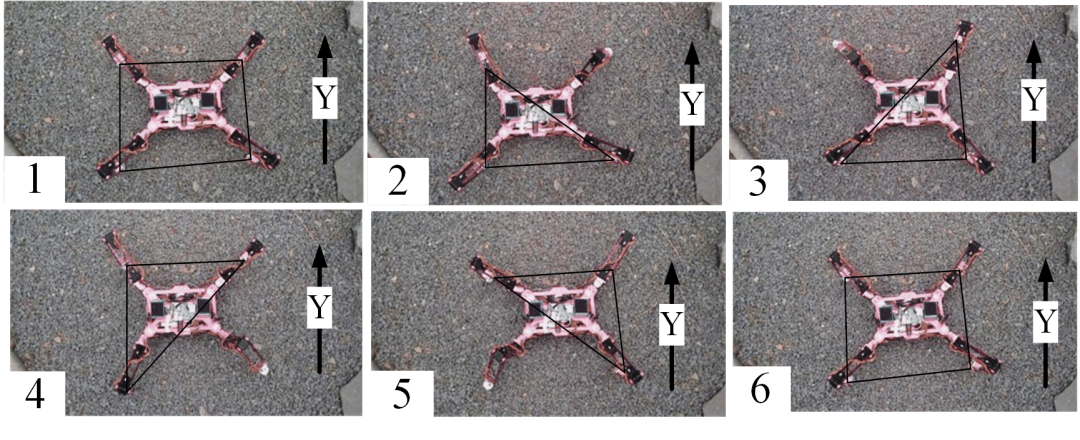
图8d 平地实验
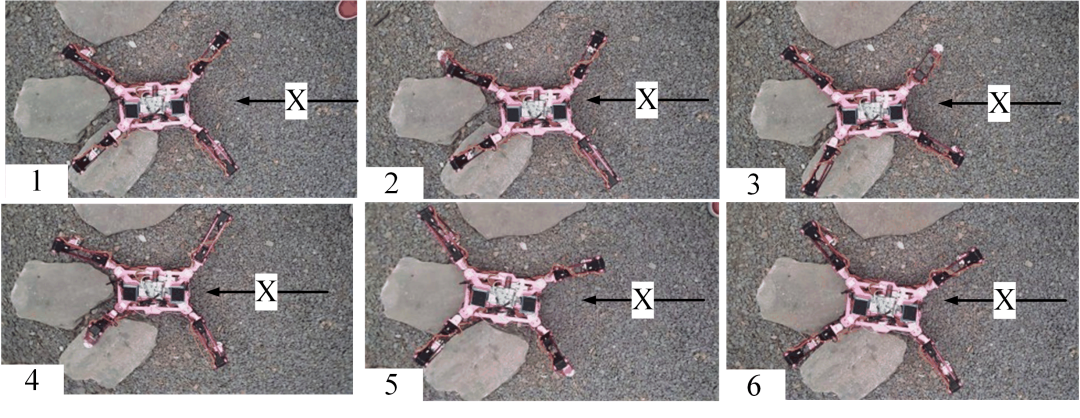
图9c 崎岖地面实验

图10c 20°斜坡实验
【作者信息】
Jiawei Chen, Kun Xu*, Xilun Ding
School of Mechanical Engineering and Automation, Beihang University, Beijing 100191, China
* Corresponding author, E-mail address: xk007@buaa.edu.cn
【DOI】
https://doi.org/10.1016/j.birob.2021.100031
【全文链接】