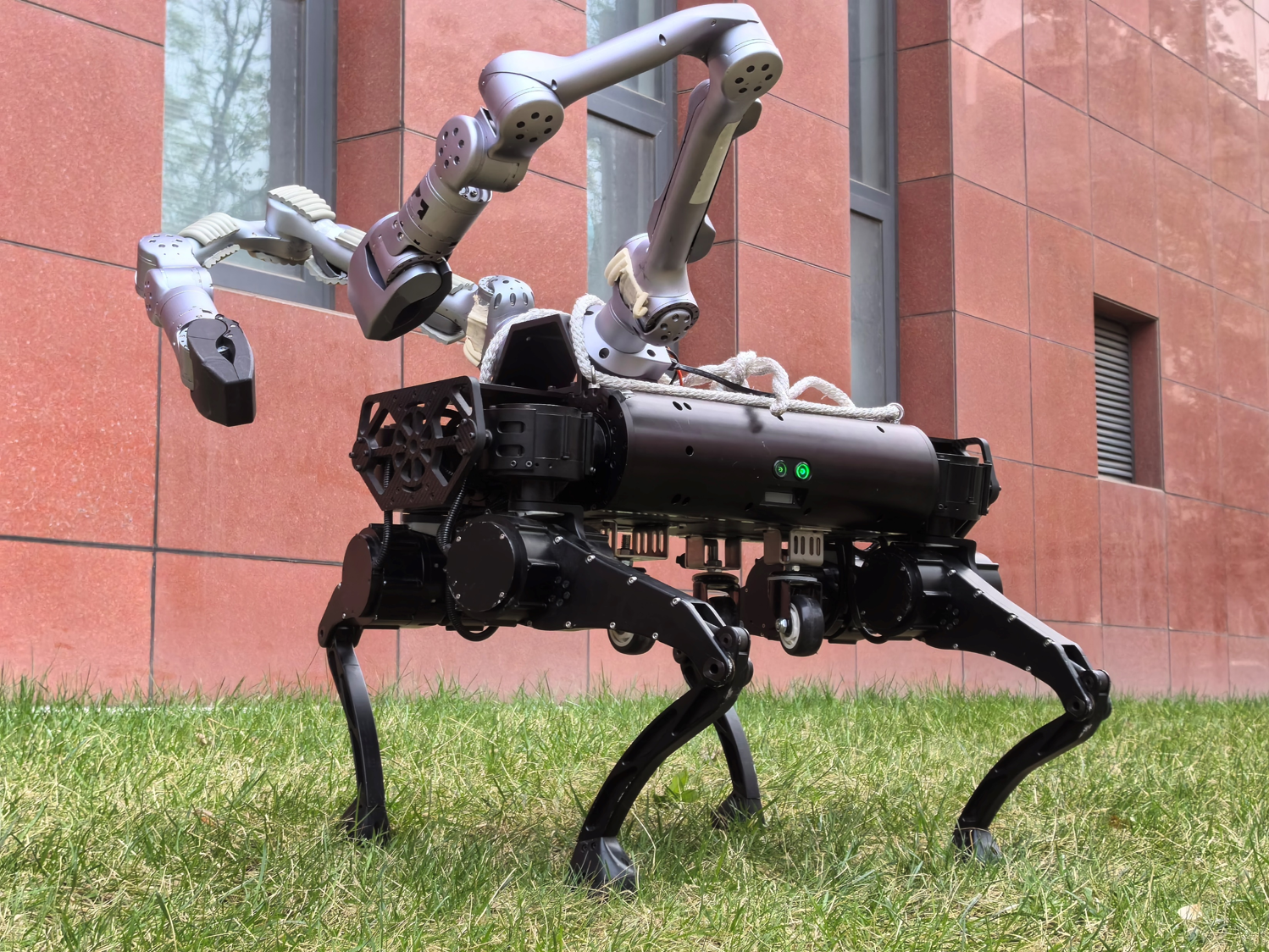
面向野外崎岖地形安防巡逻、搜救处置等移动作业任务的复杂性和多变性,研发了“驱动-传动-感知-控制”高集成高爆发电驱动关节,设计了具有大运动范围的一体化肢体,首创了仿麋鹿类哺乳动物与爬行动物的四足双臂变构型超仿生机器人,通过基于概率模型的腿足机器人的状态估计方法、融合模型先验与强化学习的运动控制方法、基于形-性特征识别的地形可通行性评估方法,实现机器人爬-步变构型适应与足臂协作自主抓取,为高山林地巡检、震后废墟救援及地外未知环境探索等提供了创新型自主无人系统方案。
主要技术参数:
本体尺寸为 618 × 225 × 800mm
本体质量为 67Kg
爬坡角度≥30°
高台攀爬≥400mm
壕沟跨越≥1000mm
双臂作业负载≥4kg

