内容摘要
一直以来,非光滑表皮对大多数生物的生存至关重要。在应用于流体流动装置时,与人造光滑表皮相反,非光滑表皮可以通过降低阻力来提高整体空气动力学性能。近期,仿生鱼鳞结构已被确定为在跨领域应用中能够提高空气动力学效率的核心仿生衍生产物。本文研究了鱼鳞阵列 (FSA) NACA 0021 模型在特定雷诺数 (Re) 约为时的空气动力学情况,该 Re 数值为使用计算流体动力学 (CFD) 工具和亚音速风洞设施的层流条件。将 3D 打印的仿生 FSA 薄膜贴于 NACA 0021 机翼进行实验,然后通过管道观察烟雾流动情况。正如在特定空气动力学条件下定性证明的结果那样,速度条纹的产生在减阻过程中具有重要作用。为了能够清晰地看到烟雾穿过重叠鱼鳞结构的过程,实验主要集中在 FSA 结构的中心和重叠区域。实验结果证明在FSA结构的中心和重叠区域存在低速和高速条纹的组合形成,FSA的重叠结构中形成的条纹可以使 FSA 0021 型号的最大阻力的减少率为9.57%。
图文导读
从鱼类样品的几何结构中获得单个鱼鳞的尺寸属性。为了实现鱼鳞阵列,将单个鳞片结构在纵轴和横轴上以线性排布,形成 3D FSA 薄膜。在约17个重叠的柱状区域中,将190个鱼鳞结构按10×19(行×列)的形式排列。薄膜的 LE 和 TE 上的平滑斜坡能够保证烟雾正常流动。包括斜坡结构在内,仿生 FSA 薄膜长约0.25m,宽约0.11m。
由于具有明确的分析和实验数据,对称 NACA 0021 翼型截面被认为是基线模型。通过在机翼模型的上表面集成仿生 FSA 薄膜,实现由 NACA 0021 到 FSA 0021 的改造。为了获取 NACA 4 系列翼型的坐标,本文编写了一个内部 MATLAB 程序代码,通过输入翼型坐标生成 NACA 0021 的 CAD 模型,并调整翼型坐标至适合机翼截面的大小,即弦长0.158m,翼展0.27m。在 FSA 0021 机翼模型中,仿生 FSA 薄膜的 LE 定位约在弦长30%处,其中弦长为0021翼型的最大厚度。为便于安装,薄膜沿翼尖之间留出0.1m的空间,并沿跨度居中,如图5所示。
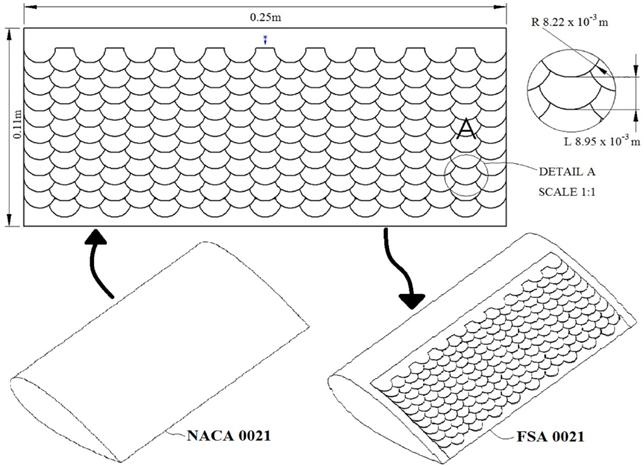
图5 仿生鱼类鳞片阵列的CAD模型:NACA 0021 和 FSA 0021
图12比较了在3种 AoA α——(0°< α<10°;δ5°)条件下,naca 0021 和 fsa 0021 实验和数值模型的压力分布(cp)。在指定的14个压力分头位置上,对测量数据(实线)和实验数据(虚线)进行比较。由于机翼的轮廓对称,压力分布曲线在 0°aoa 处重叠,如图12(a,b)所示。由于存在对称性,机翼上(1-7)和下(8-14)表面上的压丝锥处测量的cp值相同。一旦 aoa 增加,cp值即出现差异。风洞实验中获取的实验压力分布值接近cp值,此时cp值对应对齐的实线(测量)和虚线(实验)的值。图12(b,d,f)显示,由于鱼鳞阵列的存在,与 naca 0021相比,fsa 0021 上表面在端口(2-5)周围略有变化。naca 0021和 fsa 0021 中的其他端口(6-14)的cp值相同,不同 fsa 薄膜区域的cp值的大小存在变化,呈之字形波动。
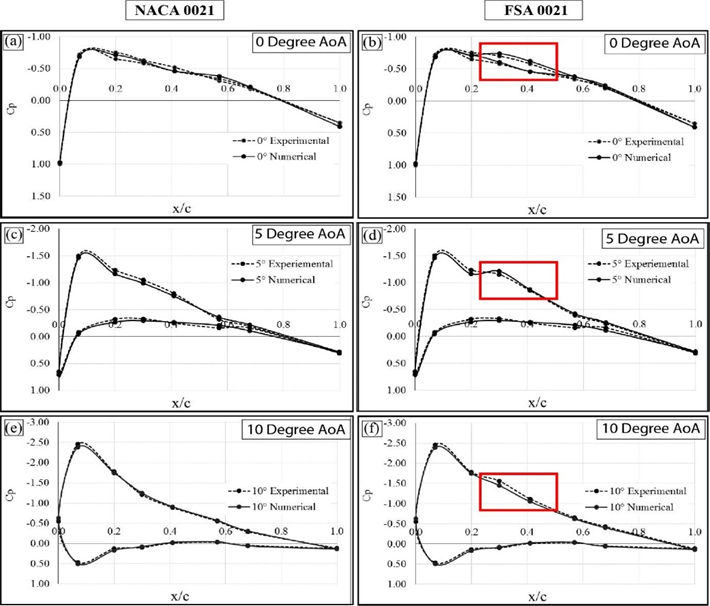
图12 NACA 0021 与 FSA 0021 的测量和实验Cp数据集:(a) NACA 0021 在0°α时的Cp分布;(b) FSA 0021 在0°α时的Cp分布;(c) NACA 0021 在5°α时的Cp分布;(d) FSA 0021 在5°α时的Cp分布;(e) NACA 0021 在10°α时的Cp分布;(f) FSA 0021 在10°α时的Cp分布。
在 FSA 0021 模型的后部观察到速度轮廓的流向交替线段,将其称作速度条纹。从图18(a)中可观察到两种条纹的形成过程:高速条纹是指在鱼鳞重叠区域形成的对比度较高的条纹,此时条纹颜色为绿色,与其他区域相比,该区域的流速更高;与高速条纹相邻的是对比度较低的低速区域,低速条纹是指在流速较小的中心区域形成的条纹,此时条纹颜色为蓝色。
图18(b)中的彩色轮廓线表示相关区域的烟雾流动方式。可以注意到,与重叠区域相比,中心区域的气流流向循环更为频繁;下方的流向循环使流速降低,从而造成整体流速降低,此时产生低速条纹。翼展速度等值线如图18(c)所示。仔细观察鱼鳞可发现,鱼鳞的中心区域形成径向分散的涡旋,涡旋远离其中心,流动方向如红色箭头所示,见图18(d)。两个尺度相邻的中心区域的分散涡旋混合形成涡旋核心,如图18(e)所示,当 FSA 在翼展方向上重叠时,重叠区域即会产生更高的速度。
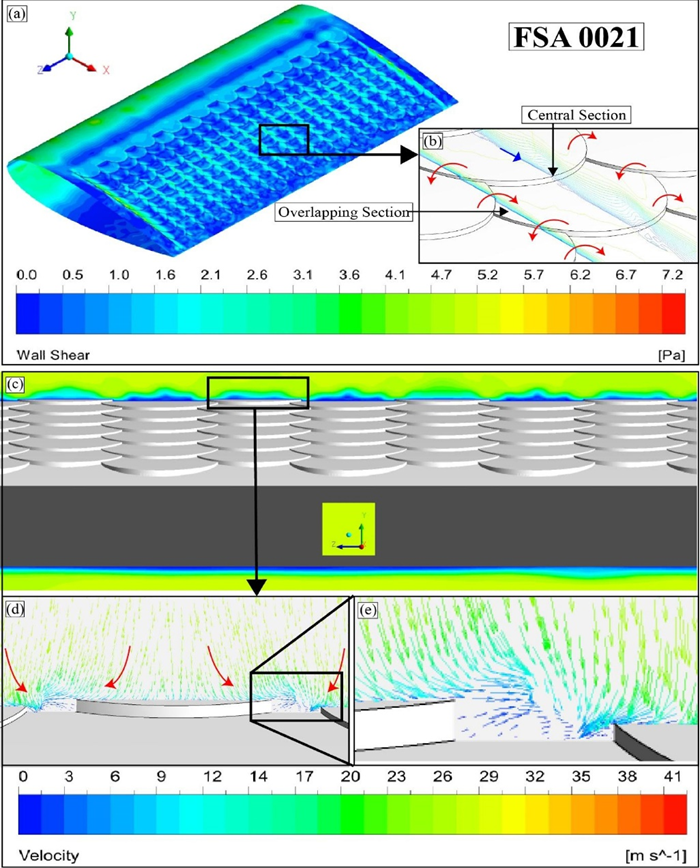
图18 减阻现象:(a) FSA 0021 在0°时的壁剪力α;(b) 通过速度条纹观察到之字形流动行为;(c) 0.64c时,沿机翼跨度的横向速度剖面图;(d) 鱼鳞上形成涡旋矢量轮廓;(e) 重叠区域的矢量等值线。
在35m/s条件下对 FSA 0021 模型进行数值分析,观察在较高速度下速度条纹的完整性。从图19可看出,FSA 0021在两种条件下相对性能相似;与图19(a,c)相比,图19(b,d)中速度轮廓线颜色加深,这表明此时速度更快;由于入口速度增加,最大壁剪力已从25m/s时的7.5Pa增加到23Pa。
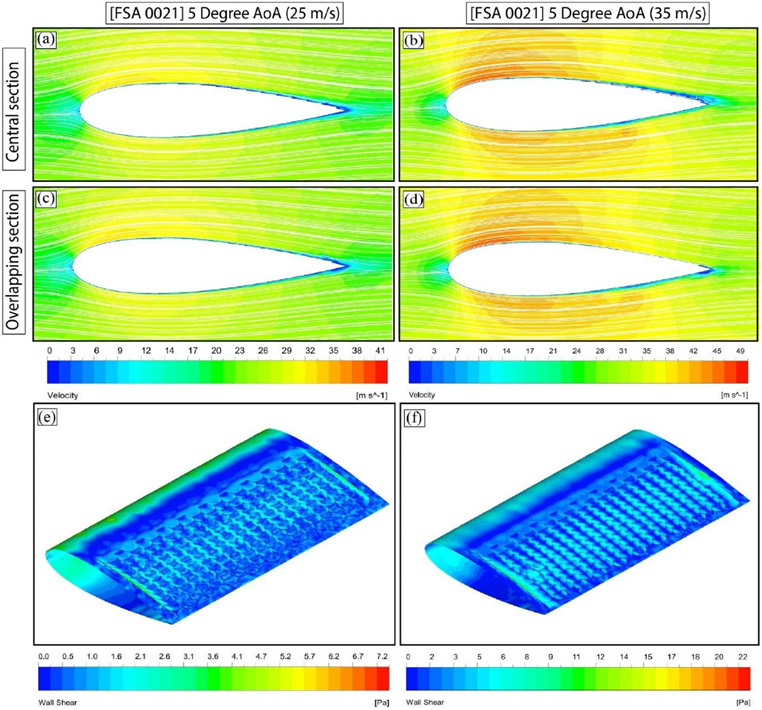
图19 5°α时,FSA 0021 模型的性能:(a) FSA 0021在25m/s时中心区域的速度剖面图;(b) FSA 0021在35m/s时中心区域的速度剖面图;(c) FSA 0021在25m/s跨重叠区域的速度剖面图;(d) FSA 0021在35m/s跨重叠区域的速度剖面图;(e) FSA 0021在25m/s时的壁剪力;(f) FSA 0021在35m/s时的壁剪力。
【作者信息】
Ganesh Natarajan S,Bruce Ralphin Rose J
Department of Mechanical Engineering, Anna University Regional Campus Tirunelveli, Tamilnadu, India
【DOI】
https://doi.org/10.1016/j.birob.2022.100045
【全文链接】

期刊信息
Biomimetic Intelligence and Robotics (BIROB, ISSN 2667-3797, CN 37-1527/TP) 聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,涉及的领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx

