视频赏析
内容摘要
当前双足机器人的运动方式主要采用双脚步行或者双轮滚动,为了结合这两种运动方式的优点,本文提出了轮足可切换双足轮腿机器人的动态轮式运动控制方法,包括轮式运动控制和原地轮足切换控制。在平坦路面上,机器人可通过双轮运动实现巡航;遇到障碍时,机器人可通过轮足切换装置切换到足式站立状态进行跨越。对于机器人轮式运动,首先推导考虑联合质心约束的运动学模型,然后建立基于变质心轮式倒立摆的动力学模型,并采用变参数线性二次型调节器 (LQR) 实现机器人轮式运动控制。对于机器人轮足切换,首先建立轮足切换平衡约束关系,然后提出一种从双轮运动状态切换到原地双足站立状态的切换策略,可保证机器人平稳实现轮和脚均触地的切换过渡。基于双足轮腿机器人 SR600-II 样机所开展的仿真和实验验证了本文提出的运动控制方法的可行性。
图文导读
(一) 轮足可切换双足轮腿机器人的系统设计。如图1所示,本文所提出的轮足可切换双足轮腿机器人 SR600-II 具有10个自由度,尺寸接近175cm成人下肢,切换模块安装于两小腿外侧,可带动轮毂电机上下平移运动,以实现运动模式的切换。
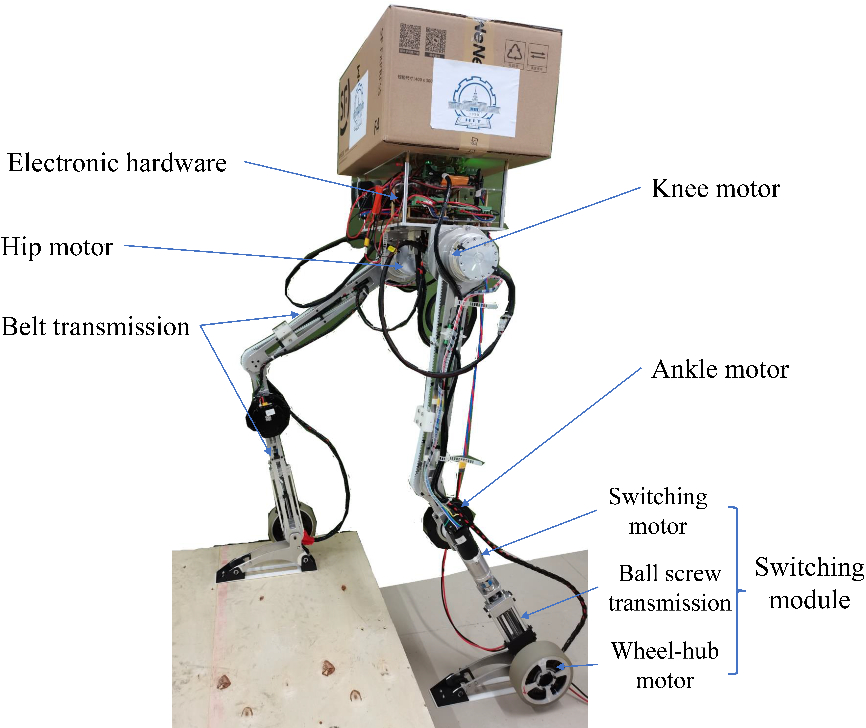
图1 轮足可切换双足轮腿机器人 SR600-II
SR600-II 对应的控制系统框架如图2所示,左侧为远程输入控制器,中间为机器人主要运动控制器,右侧表示机器人硬件。
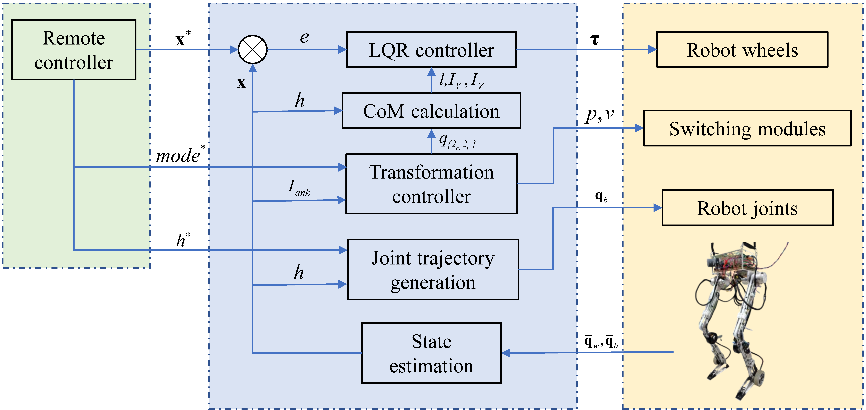
图2 机器人控制系统框架示意图
(二) 轮足可切换双足轮腿机器人运动学、动力学和轮足切换建模。第一,建立机器人考虑联合质心约束的运动学模型。机器人坐标系的建立和物理参数如图3所示,考虑联合质心位置,建立各关节变量与机器人位姿的运动学关系。
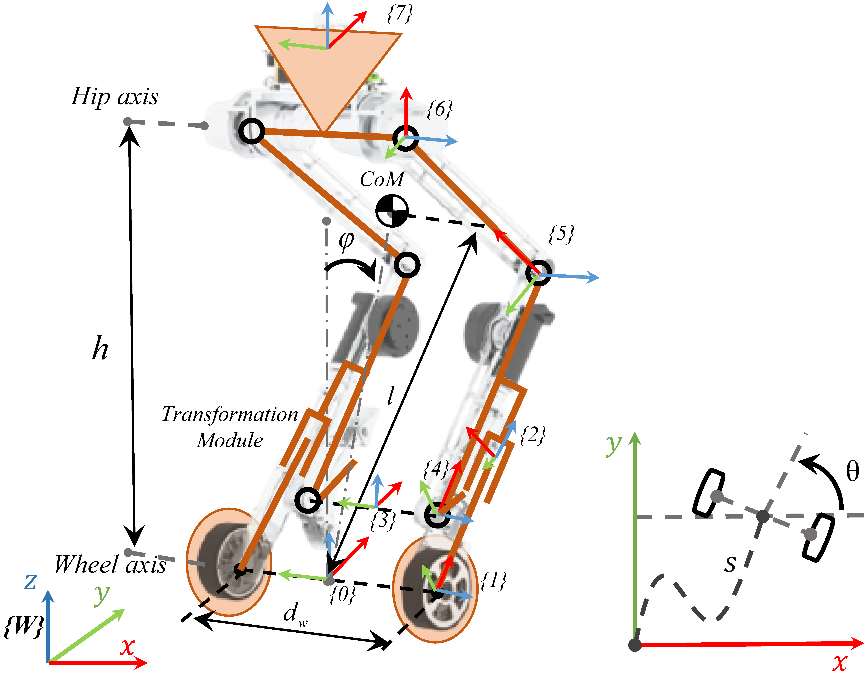
图3 机器人坐标系和主要物理参数
第二,建立机器人基于变质心轮式倒立摆的动力学模型。动力学建模中考虑了机器人姿态变化所导致的质心位置和转动惯量的改变,能够更精确地描述机器人轮式动力学现象。
第三,建立轮足切换平衡约束关系。机器人由轮式运动到原地足式站立的切换过程可分为如图4所示的3个阶段:轮式平衡阶段、过渡阶段和足式站立阶段。为保证机器人切换的平稳进行,机器人质心需满足如下平衡约束关系:轮式平衡阶段,轮上部分的联合质心竖直投影需落在双轮公共轴线上;足式站立阶段,足上部分的联合质心竖直投影需落在由双足构成的支撑多边形内;过渡阶段,机器人与地面由线接触过渡到面接触,平衡约束条件更加宽松,切换可直接进行。
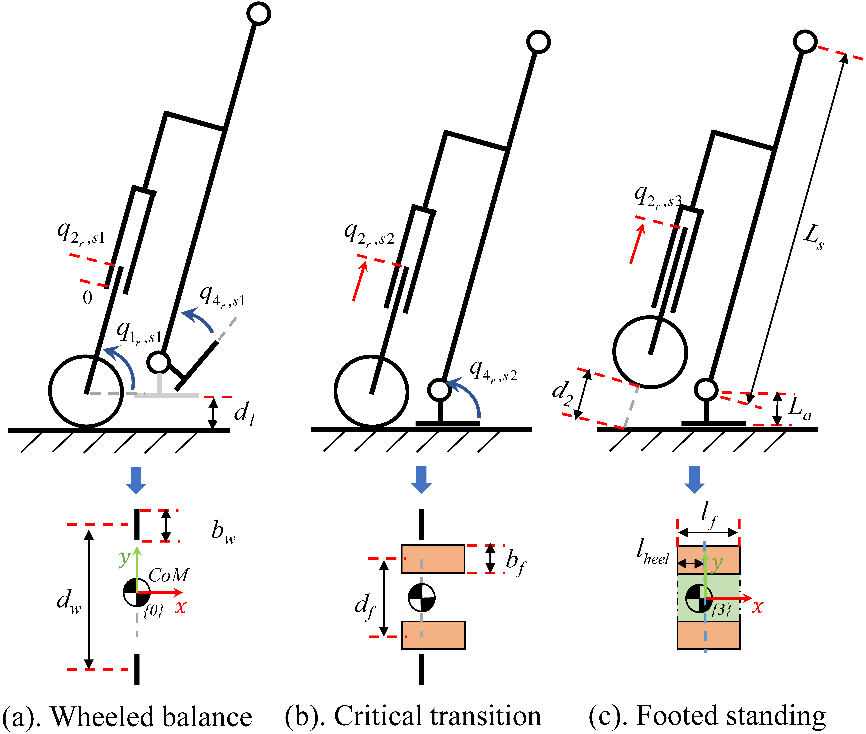
图4 原地轮足切换过程及联合质心竖直投影在轮足与地面接触区域的关系
(三) 轮足可切换双足轮腿机器人的动态运动控制方法。
首先,设计机器人采用变参数线性二次型调节器 (LQR) 的轮式运动控制器。基于所推导的双足轮腿机器人动力学模型,建立系统状态方程,其状态矩阵 A 和输入矩阵 B 是关于参数 h 的变量。采用基于 LQR 的控制器设计方法,设计出机器人变参数 LQR 控制器。然后,设计如图5所示的机器人轮足切换策略。第1阶段,机器人处于轮式平衡状态,当收到切换指令,切换模块即开始缩回驱动轮,轮式运动 LQR 控制器全程工作。第2阶段,轮和脚同时触地的过渡阶段,当踝关节电机检测到电流升高,即停止 LQR 控制器,因为双脚面接触比双轮线接触更稳定,所以调整好双脚姿态,即可完成切换。第3阶段,切换模块继续工作,带动驱动轮进一步回缩。
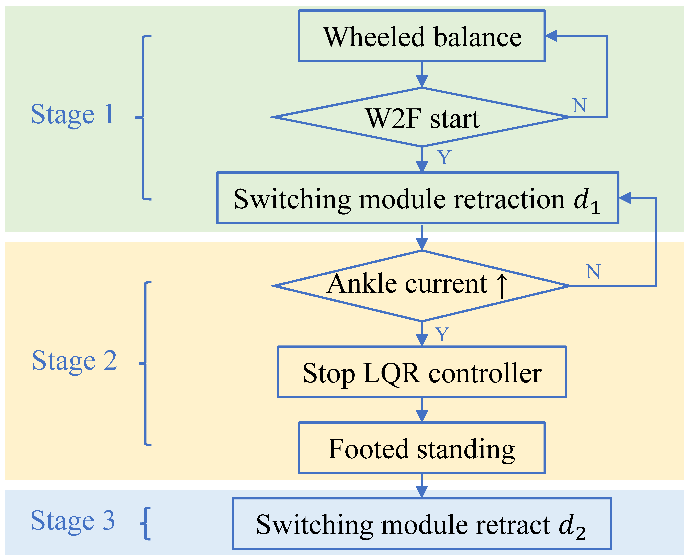
图5 原地轮足切换控制过程
(四) 实验和结果。
开展轮式运动仿真,以验证所提出的变参数 LQR 轮式运动控制器的可行性。 图6为机器人轮式前向运动并同时改变上身姿态的仿真结果,结果显示变参数 LQR 轮式运动控制器可根据机器人上部分姿态变化而改变参数,能够有效实现机器人轮式运动的稳定控制,控制效果优于 PID 控制器。
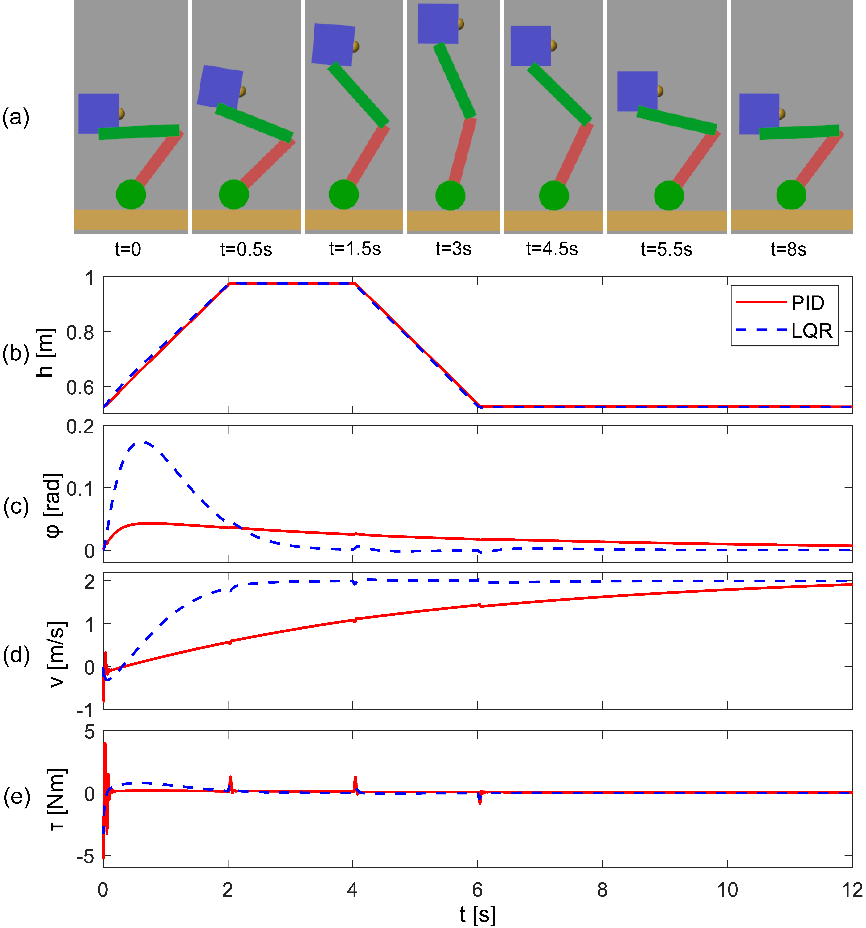
图6 仿真——机器人轮式前向运动并同时改变上身姿态
图7为机器人受到腰部水平80N冲击力作用时的运动仿真结果,结果显示变参数 LQR 轮式运动控制器可有效抵抗该冲击力,且表现出相较 PID 控制器更好的鲁棒性。
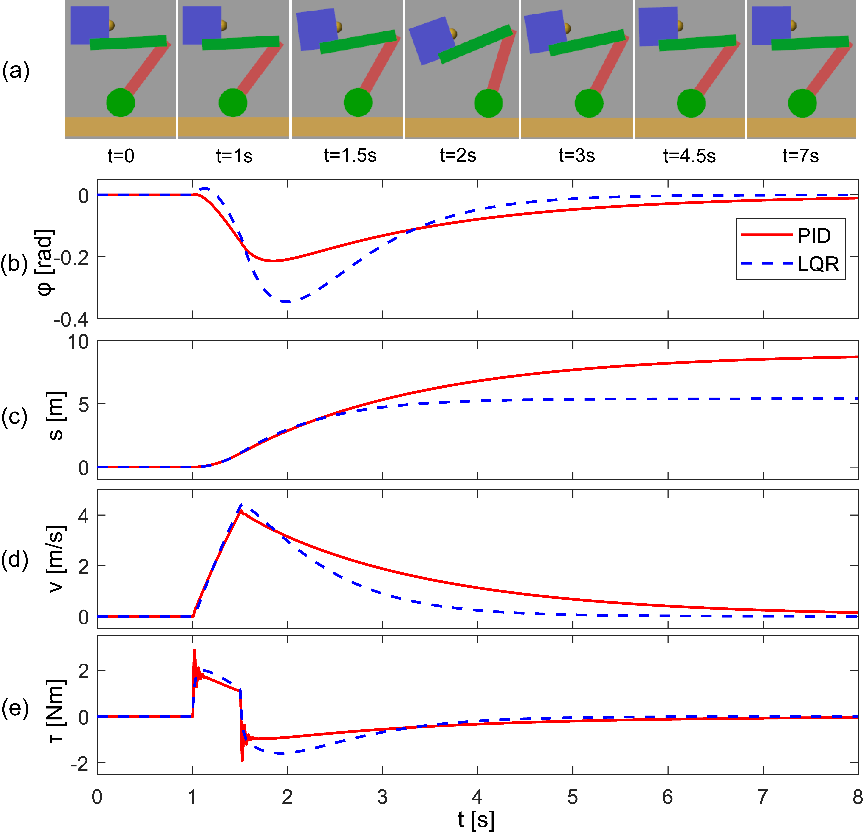
图7 仿真——机器人抵抗外力(80N)冲击
图8为机器人旋转运动并同时改变上身姿态时的运动仿真结果。
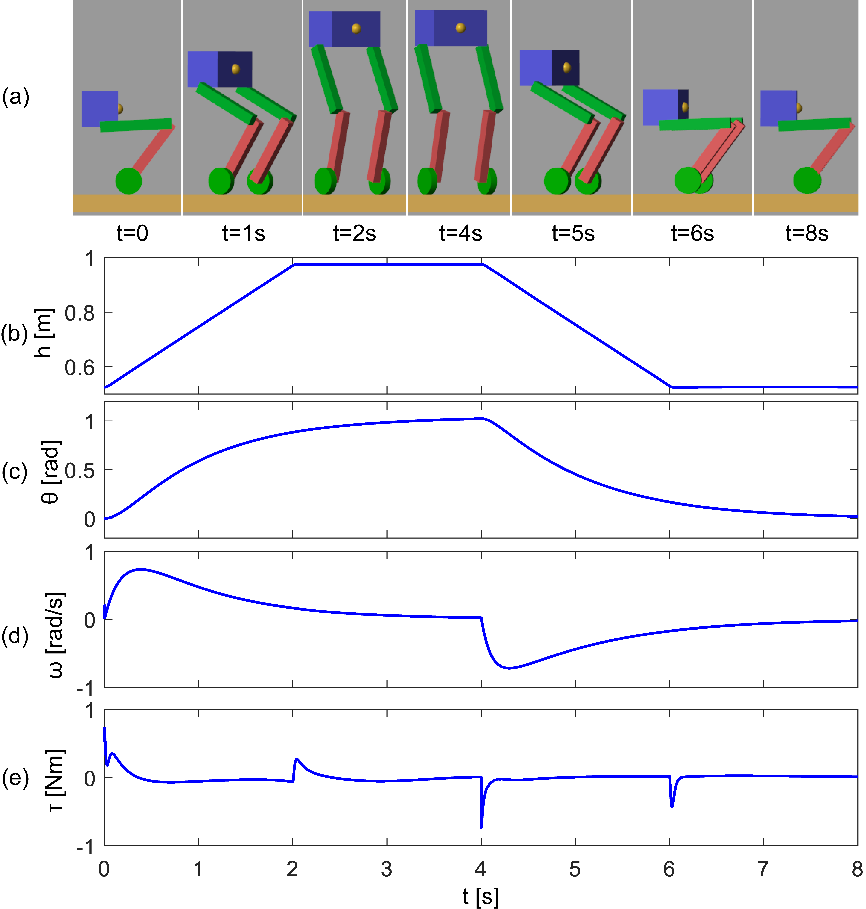
图8 仿真——机器人旋转运动并同时改变上身姿态
在 SR600-II 机器人样机上开展轮式运动和原地轮足切换实验,分别如图9和图10所示。
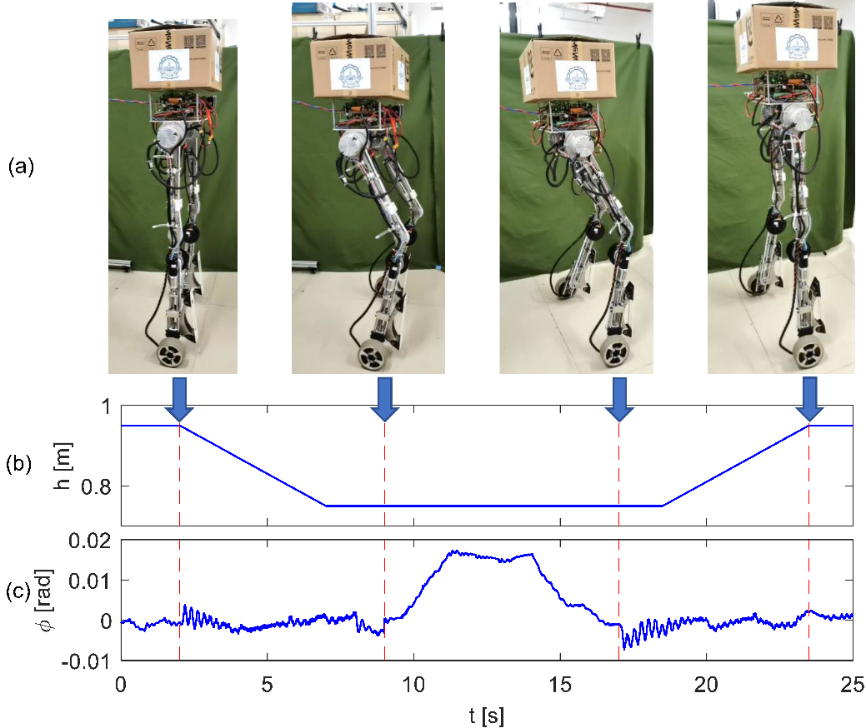
图9 实验——SR600-II 机器人动态轮式运动并改变上身姿态
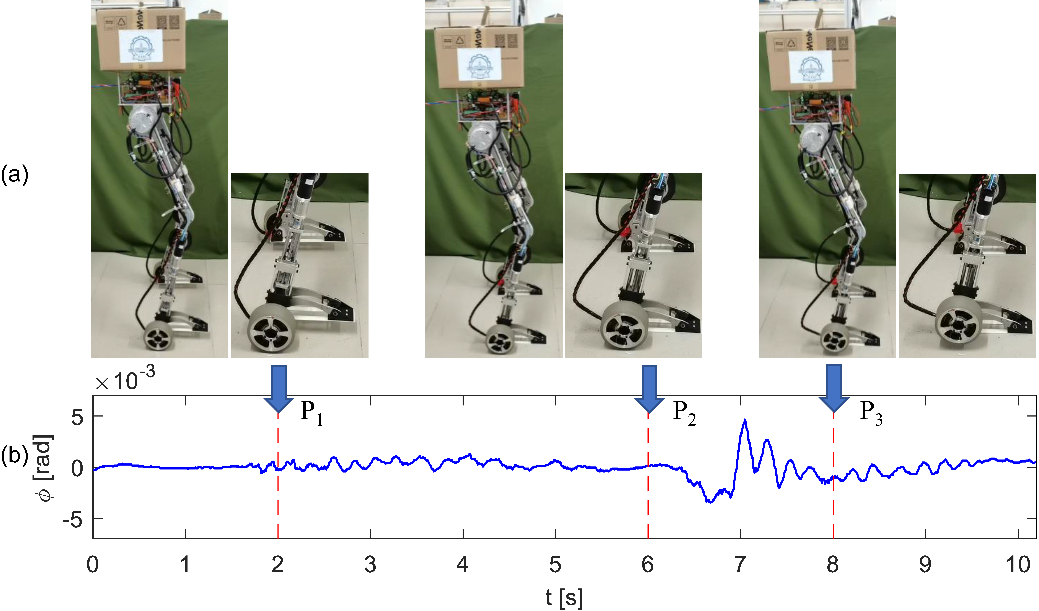
图10 实验——SR600-II 机器人原地轮足切换
仿真和样机实验结果显示,本文所提出的轮足可切换双足轮腿机器人建模和动态轮式运动控制方法是可行的。
【作者信息】
Chao Zhanga, Tangyou Liua, Shuang Songa,*, Jiaole Wanga,*, Max Q-H. Mengb,1
a The School of Mechanical Engineering and Automation, Harbin Institute of Technology, Shenzhen 518055, China
* Corresponding authors: songshuang@hit.edu.cn (S.Song), wangjiaole@hit.edu.cn (J.Wang)
b Department of Electronic and Electrical Engineering, Southern University of Science and Technology, Shenzhen 518055, China
第一作者简介:
张弨,哈尔滨工业大学(深圳)机器人感知与智能实验室博士研究生,研究方向为轮腿机器人、连续体手术机器人。
作者单位信息:
哈尔滨工业大学(深圳)机器人感知与智能实验室由IEEE Fellow、加拿大工程院院士孟庆虎教授领导,宋霜、王焦乐副教授具体指导。实验室致力于移动操作机器人、医疗机器人研发,研究方向主要包括移动机器人系统设计与运动控制、微创手术机器人系统设计与感知理论研究、连续型手术机器人设计及其实时形状感知与检测技术、新型胶囊机器人结构设计与位置感知技术、微型机器人主动驱动技术、手术导航定位以及医学图像处理等。
【DOI】
https://doi.org/10.1016/j.birob.2021.100027
【全文链接】

期刊信息
Biomimetic Intelligence and Robotics (BIROB, ISSN 2667-3797, CN 37-1527/TP) 聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统,等等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx

