视频赏析
内容摘要
如何保持稳定行走一直是腿足式机器人所关注的问题之一,而基于上个世纪提出的被动步态,可以证明双足结构本身具有一定的稳定性。这样的稳定性主要体现在被动行走下的极限环步态,也就是单周期步态,即机器人运动的每一步便是一个周期。但随着外部条件的改变,如摩擦力系数、被动步态下坡度的大小等,双足机器人会呈现出双周期步态,甚至混沌步态。这样的步态也类似于混沌学中的 Logistic map,即从稳定逐渐趋于混沌。
本文通过圆弧脚双足机器人的被动行走模型,在考虑一个更严格的摩擦力模型的基础上,找到了保持单周期步态的一个必要条件,这有助于在控制设计中积极利用腿部运动系统的自身特性来提高机器人运动的稳定性。
本文就上述问题,以圆弧脚的双足机器人为模型,在同时考虑动摩擦力和静摩擦力的基础上进行了被动步态的建模与数值仿真,通过分析能量的离散变化,发现了该必要条件。并且该必要条件不仅适用于当前模型,更适用于一般腿足机器人模型。
图文导读
上述问题一直没有被解决,原因之一在于针对环境作用力,并没有一个严格约束的模型,所以本文首先提出了一个更严格的摩擦力模型,如图2所示。该 LuGre 模型从微观层面入手,将宏观接触面的相互作用看作微观层面上刚毛的相互作用,通过模拟微观刚毛的形变来得到宏观下的摩擦力,因此该模型不仅可以得到动摩擦力,更可以得到难以建模的静摩擦力。
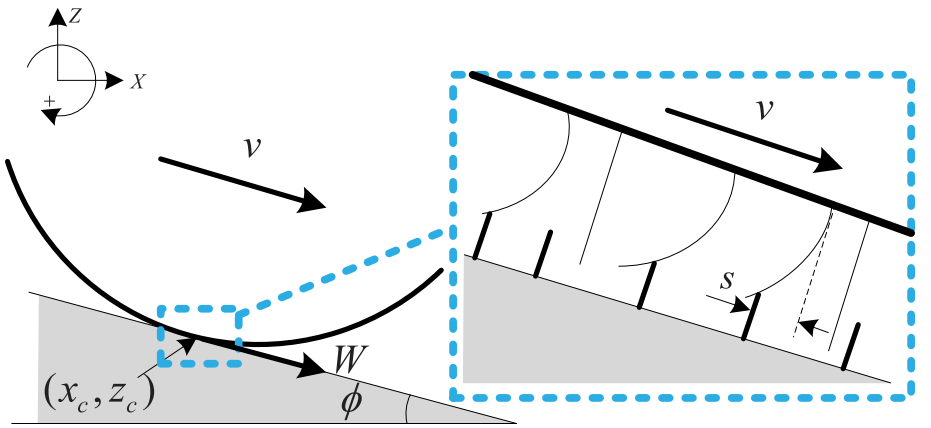
图2 一个更严格的同时考虑动摩擦与静摩擦的 LuGre 摩擦力模型
基于此模型,本文提出了机器人的动力学数学建模方法,数学模型如图1所示。
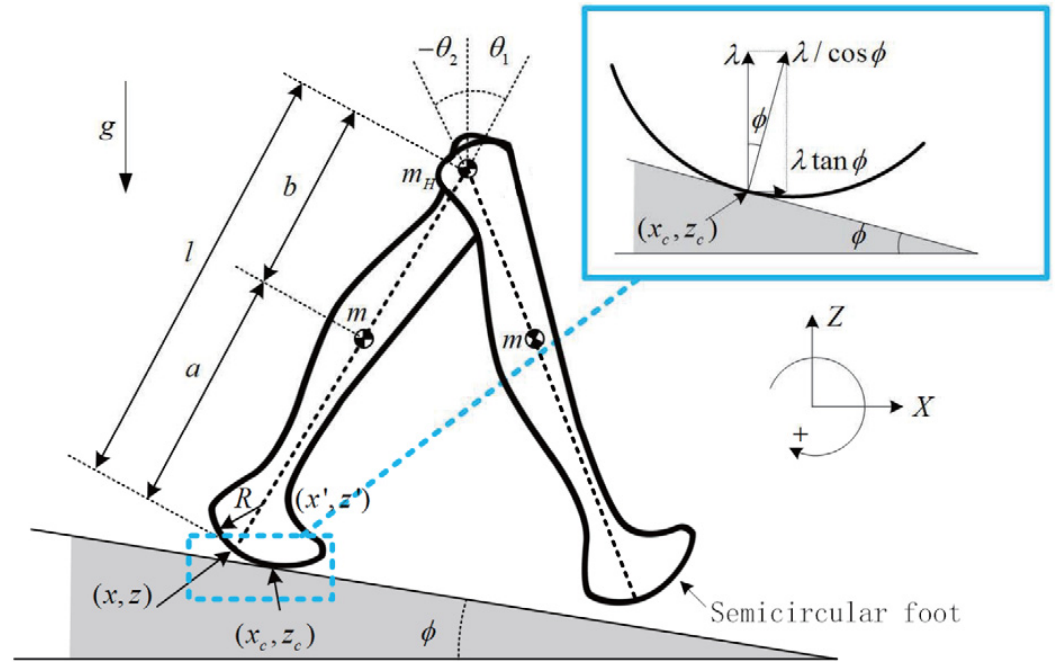
图1 本文所提出的圆弧脚双足机器人的数学模型
本文不仅考虑了行走时的连续非线性系统,也考虑了由于游离脚触地而对系统造成的影响,即连续系统的离散转换。在建立了精确的动力学模型后,通过数值仿真,首先验证了同时考虑静摩擦与动摩擦的 LuGre 模型的有效性和精确性,也展示了单周期、双周期的步态,以及随着外界变化步态的变化—从单周期到混沌。并且,本文从能量角度给出了一个保持单周期的必要条件:换脚时碰撞所消耗的能量需大于运动过程中摩擦力所消耗的能量,如图7所示。本文最终也利用庞加莱映射给出了稳定性分析。
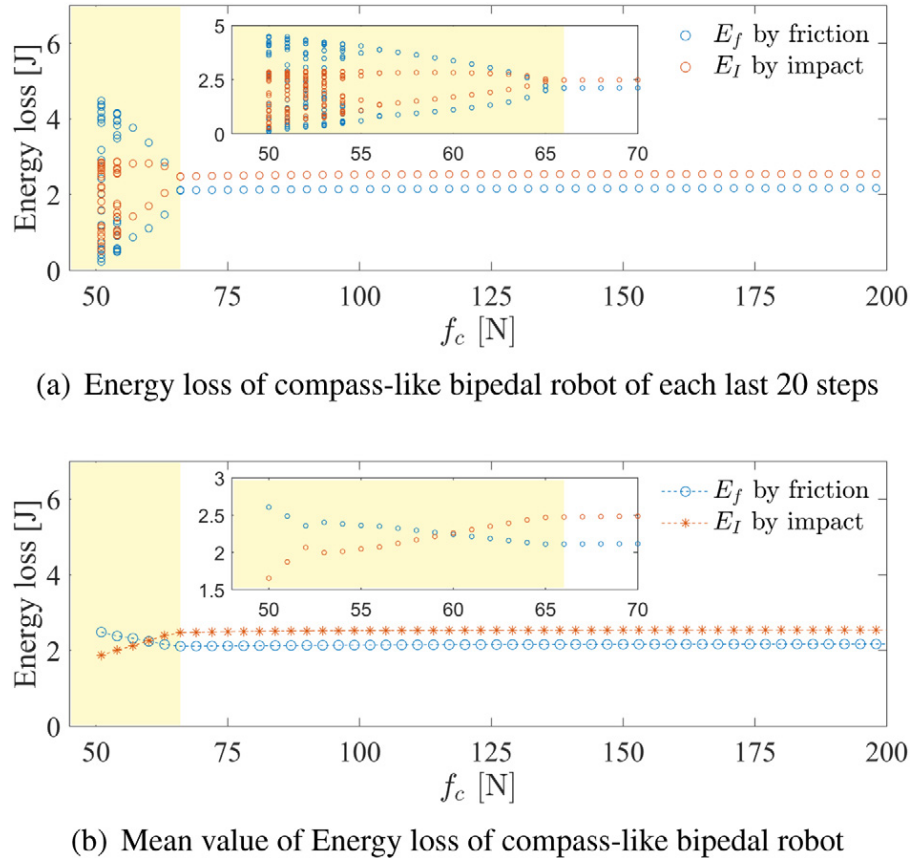
图7 随着摩擦力大小变化的能量损失
【作者信息】
Yanqiu Zhenga, Longchuan Lib,Yuxuan Xianga,Yuetong Hea,Cong Yana,Fumihiko Asanoa
a The School of Information Science, Japan Advanced Institute of Science and Technology, Ishikawa 923-1292, Japan
b The College of Information Science and Technology, Beijing University of Chemical Technology, Beijing 100029, China
【DOI】
https://doi.org/10.1016/j.birob.2022.100048
【全文链接】


