内容摘要
计算仿真可以加速折纸机器人的设计和建模进程。基于Python开发的算法,本文提出了一种可同时生成不同曲面细分折纸折痕图案的计算方法,通过引入自动生成可缩放矢量图形格式的折纸折痕图案系统,实现这一过程的自动化。不同的参数的引入能够使相同的底层镶嵌折痕产生不同的图案变化。用户界面由输入文件构成,用户在其中输入所需的参数后,用Python编写的算法处理,生成相应的折纸2D折痕图案,再将这些折纸折痕图案输入到当前折纸设计的软件和算法中生成折纸设计模型,从而能够更快速便捷地进行比对分析。利用基础的仿生灵感折纸图案,通过改变下层折纸图案的参数,生成对称和不对称的弹簧折纸3D结构。此外,本文还从输入折痕图案和折纸结构的相应手动折叠这两个方面,对折纸模拟器的折纸设计输出进行了定性分析。本文的工作主要包括 (1) 开发用于生成弹簧折纸折痕图案的自动化管道;(2)通过改变底层折痕图案的参数以生成不同折纸结构和特征,由此论证了本文基于折纸弹簧折痕图案所提出的结论;(3)进行折纸模拟器的折纸设计输出与折纸结构的手动折叠之间的定性比较。
图文导读
为了证明计算折纸仿真在多个折纸结构的设计和原型机制造中的优势,将AGS使用的由拟定的系统开发的SVG文件作为输入(计算输出),模拟生成折叠折纸折痕结构,并把从此结构中观察到的特征与从结构的物理折叠中观察到的特征进行比较。根据生成的折纸弹簧结果将研究结果分为4类:系统的定性分析(扭曲)、系统的定量分析(闭合角)、系统的可行性和平台的选择以及弹簧折纸结构的应变分析。
(1)扭曲-系统的定性分析。圆柱形扭曲是不对称弹簧折纸的固有特性,并会产生结构的块旋转,如图6所示。扭曲的方向和幅度与左比(H/L)和右比(H/R)之间的差异成正比:
当H/L 时,结构特征为逆时针(CCW)扭转,此时
时,结构特征为逆时针(CCW)扭转,此时 扭转的幅度与成正比;
扭转的幅度与成正比;
当H/L>H/R,即 时,结构特征为顺时针(CW)扭转,此时扭转的幅度与成正比;
时,结构特征为顺时针(CW)扭转,此时扭转的幅度与成正比;
当H/L=H/R,即 时,结构特征显示为无扭曲(对称结构),此时扭转的幅度为0。
时,结构特征显示为无扭曲(对称结构),此时扭转的幅度为0。
从图6可以看出,在计算输出和物理折叠中都可以观察到不对称折纸弹簧结构的扭曲。
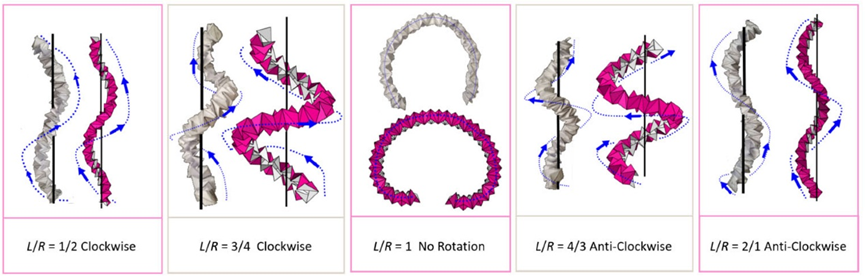
图6 比较物理折叠和计算折叠的扭曲情况
(2)物理折叠和AGS折叠的定量比较。本文通过4个实验比较了AGS折叠和物理折叠,从不同角度证明了二者之间的相似性。本文的重点是分析弹簧折纸结构的不对称性,准确来说,是分析受环节动物启发的驱动器的螺旋特征。验证部分研究了产生非对称特征的主要参数,即L/R。实验分为单基折叠验证和结构折叠验证两部分,前者包括验证单个基底的折叠和闭合角度,后者包括扭曲弹簧折纸的归一化半径和不对称扭曲折纸的方位角。
本次验证的重点是比较折叠百分比变化时单基物理折叠和AGS折叠的特性。通过使用不同的L/R比率的单基来证明L/R比率是单基折叠中的变量之一,测量两个铰链在不同折叠百分比下的位置差,并将其定义为

其中,YOA表示y原点(图7(A)中的点O)和右铰链(图7(A)中的点A)之间的轴坐标;YOB表示y原点和左铰链(图7(A)中的点B)之间的轴坐标;y轴上的点A、点B及坐标原点分别用yA、yB和yO来表示。图7(A)是AGS折叠与物理折叠在单弹簧折纸底座折叠方面的比较。结果表明在不同折叠百分比和不同的L/R比率的情况下,AGS折叠和物理折叠存在相似性,此外,少量不对称性折纸和对称性折纸的 趋近并等于1。图7(B)比较了物理折叠与计算折叠的闭合角度,闭合角度是指自由襟翼边缘和水平边缘之间的锐角。不同L/R值的弹簧折纸结构有不同的闭合角度,两个折叠均使用二阶多项式。
趋近并等于1。图7(B)比较了物理折叠与计算折叠的闭合角度,闭合角度是指自由襟翼边缘和水平边缘之间的锐角。不同L/R值的弹簧折纸结构有不同的闭合角度,两个折叠均使用二阶多项式。
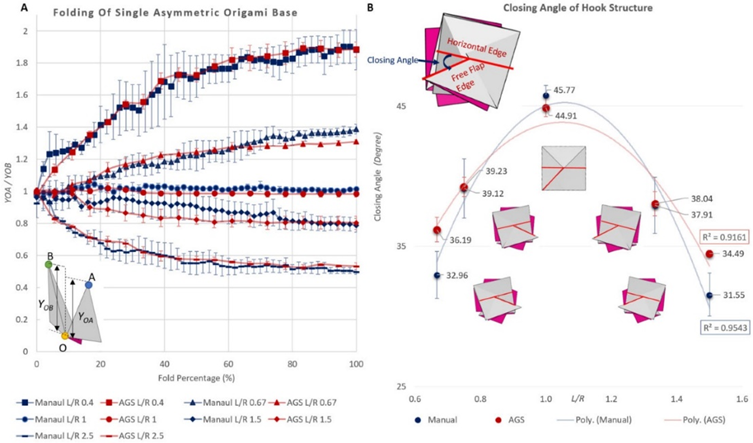
图7 在某些特定角度,物理折叠会显示出与AGS折叠相似的折叠
(3)弹簧折纸结构的应变分析。AGS支持从折纸应变的角度比较对称和非对称弹簧折纸结构。此外,AGS可以通过调整模拟器的最大应变值来显示不同的应变效果,例如,模拟器将应变值由光谱上RGB色之一的蓝色(无应变)调整至红色(最大应变),并生成3D模型进行可视化分析,如图12(A)所示。通过指定的折叠参数使应变可视化,这些参数包括最大应变水平、褶皱刚度、轴向刚度、面刚度、小平面折痕刚度和阻尼比。
在相同倍率(60%)情况下,对扭曲(第3部分(A)节)和闭合角(第3部分(B)节)折纸结构进行应变分析,二者的最大应变分别为2.3%和5%,结果分别如图12(B)和图12(C)所示。由图中可以发现:最大应变为2.3%时, L/R 值越接近1,应变水平越低;最大应变为5%时,L/R值拉近1。
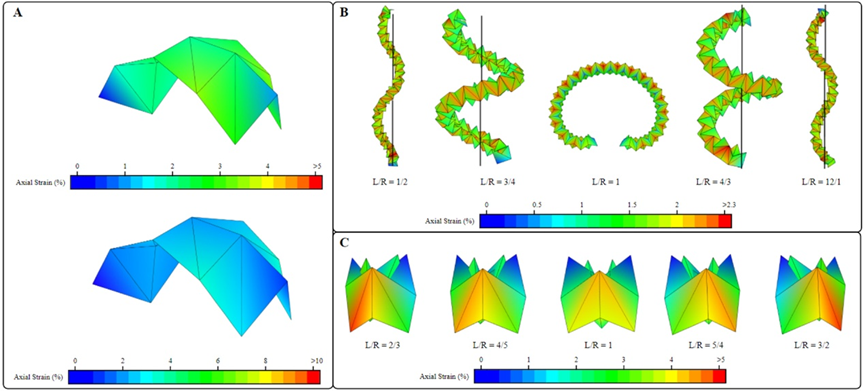
图12 弹簧折纸结构扭曲和闭合角的应变分析结果
【作者信息】
Yu Xing Teoa,Catherine Jiayi Caia,Bok Seng Yeowa,Zion Tsz Ho Tseb,Hongliang Renc,a,*
a Biomedical Engineering Department, National University of Singapore, Singapore, 117575, Singapore
b Department of Electronic Engineering, University of York, York YO105DD, UK
c Department of Electronic Engineering, Chinese University of Hong Kong, China
* Corresponding author.
E-mail address: hlren@ieee.org.
【DOI】
https://doi.org/10.1016/j.birob.2022.100036
【全文链接】


