机器人开放服务平台
证书查询
中心邮箱
山大邮箱
图书馆
信息服务
财务系统
研究生系统
软件平台
校外vpn
首页
中心简介
中心概况
组织架构
管理委员会
发展历程
信息动态
通知公告
新闻动态
师资队伍
杰出人才
研究人员
博导团队
科学研究
研究方向
科研条件
科研成果
人才培养
博士生
硕士生
本科生
毕业生
合作交流
学术动态
成果推介
学术期刊
BIRob简介
编委会
期刊新闻
专刊资讯
联系我们
联系方式
招聘信息
新闻动态
18
2026-06
喜报 | 8.6!BIRob影响因子创新高
30
2026-04
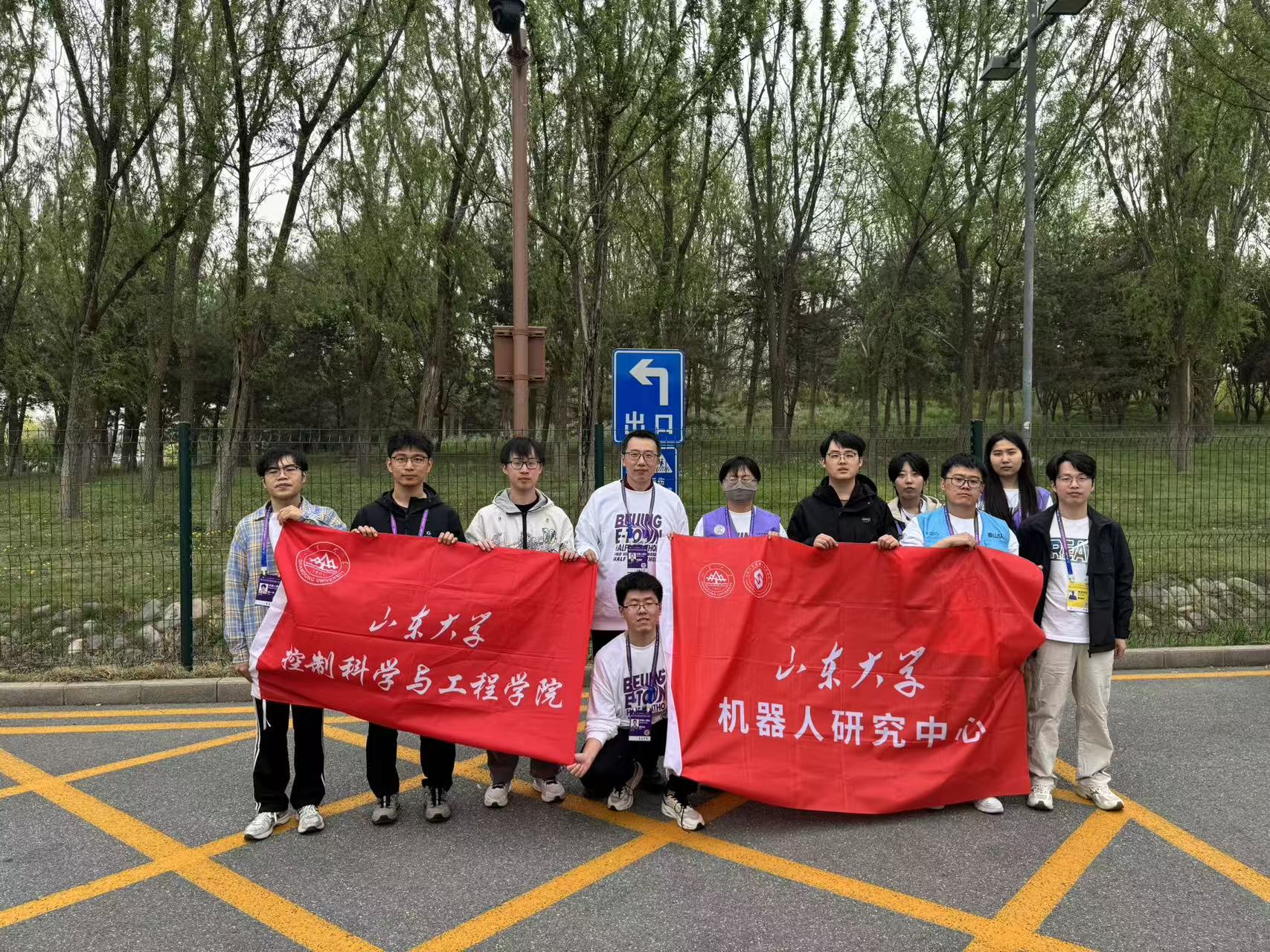
山东大学机器人研究中心团队亮相北京亦庄人形机器人半...
28
2026-04
智控绿茵· 筑梦未来| 山东省首届人形机器人足球赛成功...
30
2025-09
山大研究生在第七届中国研究生机器人创新设计大赛全国...
18
2026-06
喜报 | 8.6!BIRob影响因子创新高
30
2026-04
山东大学机器人研究中心团队亮相北京亦庄人形机器人半程马拉松赛
28
2026-04
智控绿茵· 筑梦未来| 山东省首届人形机器人足球赛成功举办
09
2026-01
山东大学机器人研究中心团队亮相2025智能机器人大赛
14
2025-11
山大控院学子在第十九届“挑战杯”大学生课外学术科技竞赛中...
30
2025-09
山大研究生在第七届中国研究生机器人创新设计大赛全国总决赛...
查看更多
通知公告
02
2024-04
山东大学机器人研究中心关于对非法假冒我单位名义开展研学活动的严正声明
25
2024-12
关于2024年度国家自然科学基金项目结题的通知
28
2024-09
关于招标采购管理系统升级的通知
14
2024-09
关于2024年中秋节、国庆节放假的通知
04
2024-09
关于开展2023-2024学年大型仪器设备使用信息统计工作的通知
01
2024-09
2024年秋季学期开学安全提示
查看更多
研究成果
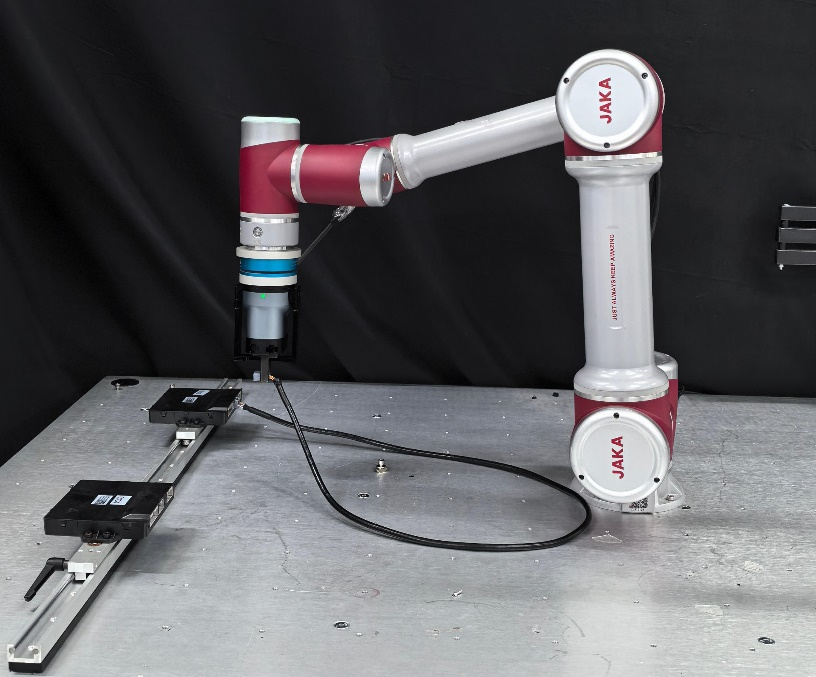
双臂机器人技能学习与柔性操作
双臂机器人技能学习与柔性操作
面向机器人汽车空调管路与线束柔性装配环境,创造性地提出了机器人操作状态认知、融合多领域专家知识的高效率模仿学习与技能增强泛化方法,攻克了操作状态感知难、技能学习效率低、技能泛化增强能力弱的难题,搭建工业级高精度双臂模仿学习具身作业系统,实现了机器人在环境复杂、任务多变、多约束条件下的操作任务泛化...
查看更多
双足/人形机器人
双足/人形机器人
针对双足与人形机器人在非连续地面、崎岖山地、陡直台阶等复杂地形中通过性不足的核心痛点,团队聚焦高动态双足与人形机器人驱动与控制关键技术研究,成功突破 “驱 - 传 - 感 - 控” 一体化关节设计、基于模型预测控制的高动态运动控制、基于强化学习的运动生成与动作模仿等核心关键技术。依托上述技术成果,团队自主...
查看更多
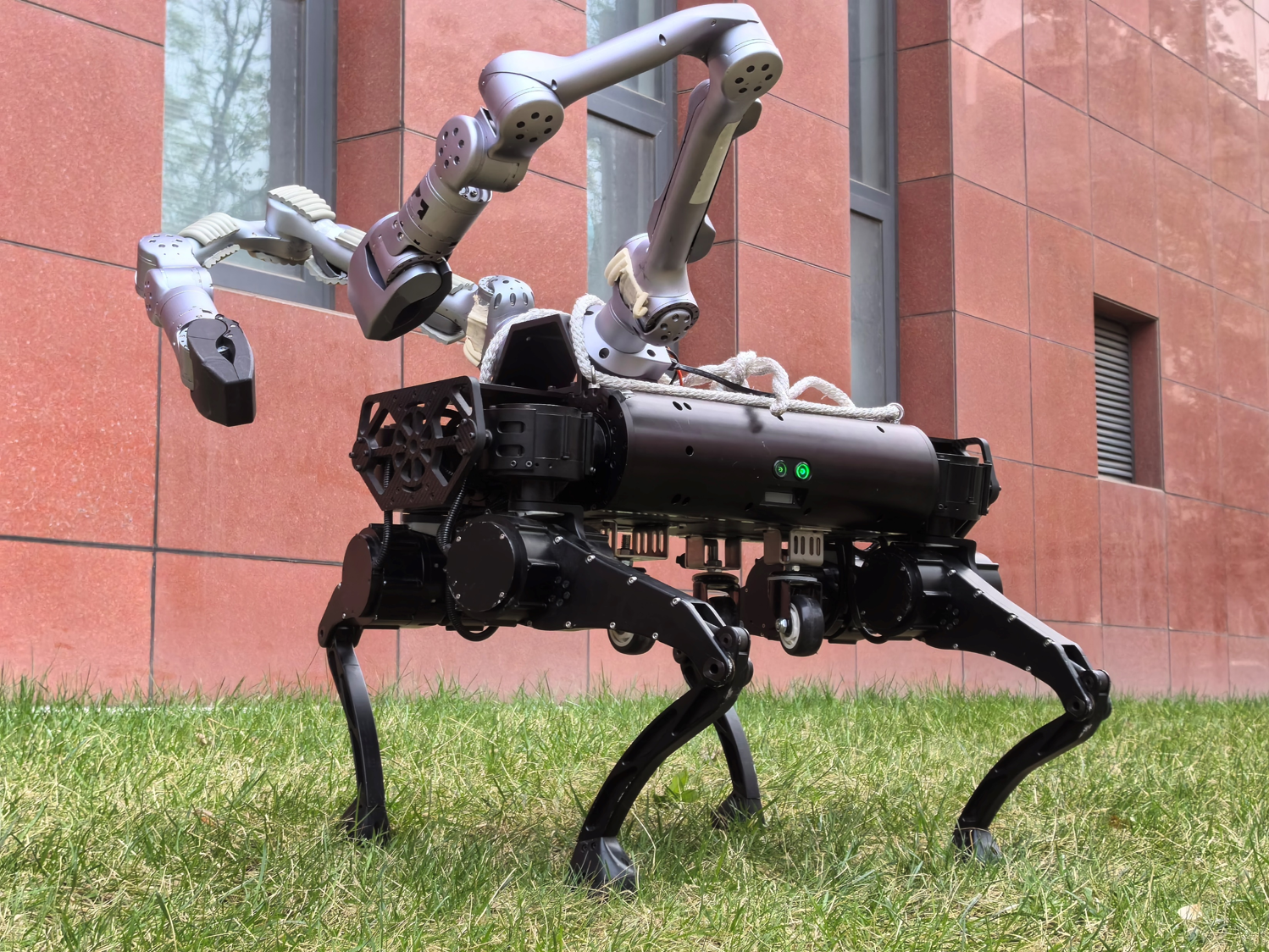
爬-步变构型四足双臂机器人
爬-步变构型四足双臂机器人
面向野外崎岖地形安防巡逻、搜救处置等移动作业任务的复杂性和多变性,研发了“驱动-传动-感知-控制”高集成高爆发电驱动关节,设计了具有大运动范围的一体化肢体,首创了仿麋鹿类哺乳动物与爬行动物的四足双臂变构型超仿生机器人,通过基于概率模型的腿足机器人的状态估计方法、融合模型先验与强化学习的运动控制方法...
查看更多
警用应急处置机器人
警用应急处置机器人
警用应急处置机器人主要用于代替人到不能去或不适宜去的有爆炸等危险的环境中,在事发现场进行侦察、排除和处理爆炸可疑物等危险品。 特点: (1)采用优质进口电机、减速器,可靠性高,使用寿命长;(2)多自由度...
查看更多
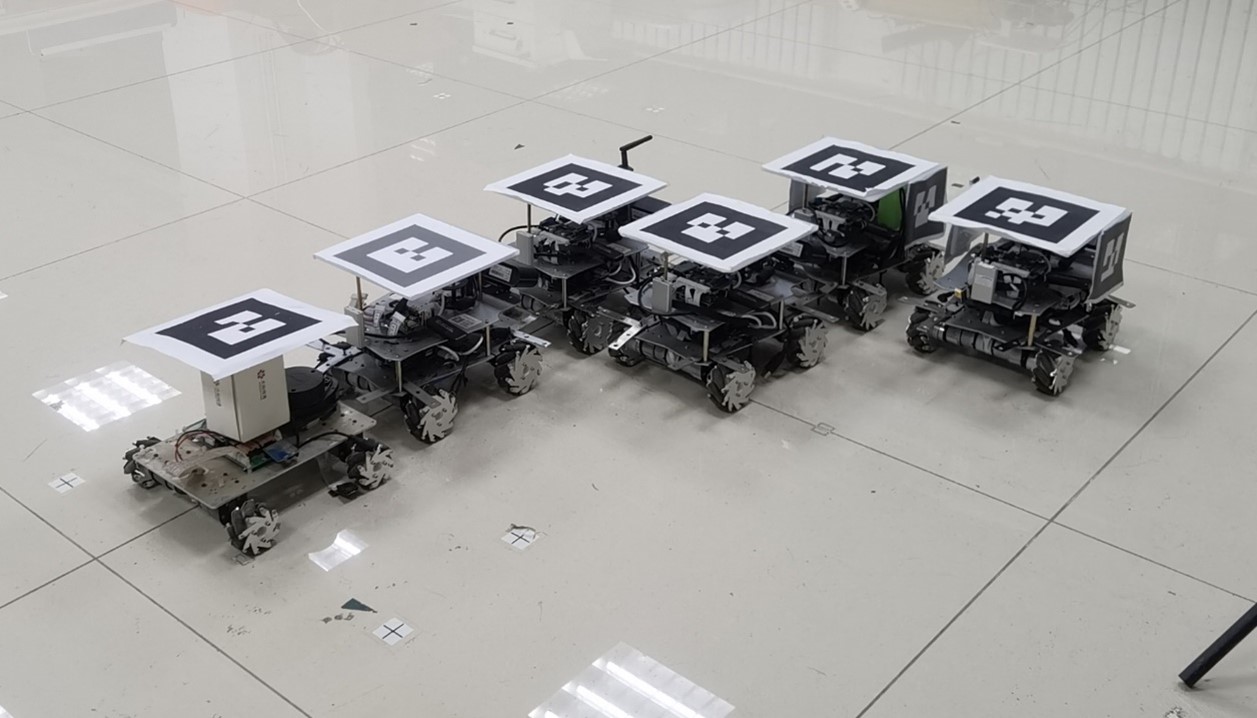
多机器人分布协同与群体智能技术
多机器人分布协同与群体智能技术
针对复杂环境下多机器人集群运动规划、协同控制、编组优化等问题,研制了多机器人系统和机器人集群的协同规划和控制技术方法群。机器人编组过程中存在碰撞约束、速度加速度约束,以及编组过程的就位顺序约束,使得列队编组过程的优化规划和控制存在困难,提出了路径时间维多机器人近最优轨迹层次规划算法;随着多机器人...
查看更多
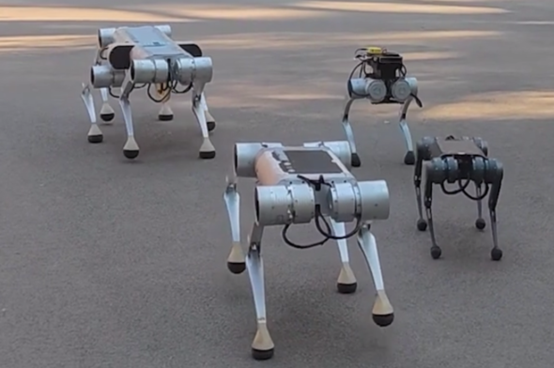
高性能电驱动腿足机器人
高性能电驱动腿足机器人
针对轮式和履带式移动机器人在陡直台阶或壕沟非连续地面、崎岖山地、建筑物灾后废墟等复杂地形环境中通过性不足的难题,对高动态腿足机器人驱动与控制技术开展研究,突破了电动腿足机器人高功率密度关节驱动、动态稳定运动规划与控制、多元感知与智能发育等多项关键技术,研制出国内首款高动态模块化点接触式双足机器人...
查看更多
迎宾讲解机器人
迎宾讲解机器人
迎宾讲解机器人具有自主迎宾、语音交互、推广宣传、娱乐互动、远程操控、自主定位与导航、自动充电等功能,可以应用于酒店、展厅、银行、超市、科技馆、机场、车站、展会等场合。
查看更多
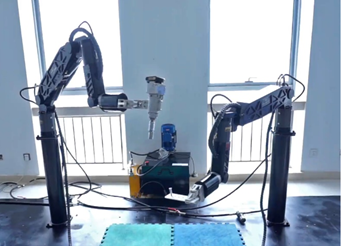
力反馈主从遥操作液压机械臂
力反馈主从遥操作液压机械臂
力反馈主从遥操作液压机械臂由具有力觉临场感的6自由度遥操作主手、4+1自由度液压机械臂、控制与通讯系统组成。 液压机械臂具有结构紧凑、负载大的特点。可以应用于强辐射、防爆、高负载等应用场合。 双液压臂协作 ...
查看更多
友情链接
山东大学
智能无人系统教育部工程研究中心
山东大学控制科学与工程学院